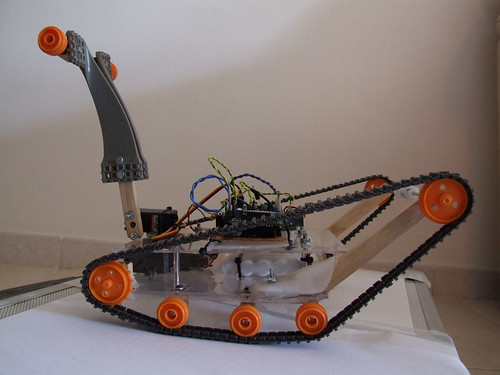
Since I’ve started messing with robotics that I wanted to build a tank, and finally that moment arrived when two Tamiya thread kits and a Twin Motor Gearbox arrived.
My interest in robotics was always present, but until a certain age it was a complete unachievable skill due to my artistic and non engineering background. When I discovered the Arduino platform I started to mess with LEDs, buttons, breadboards, sensors and motors, and when suddenly I gathered everything into one piece my first robot was born. After that many robots and strange creatures appeared. Most of all, the main objective was to have loads of FUN!! I never imagined that this hobby would become a business someday!
Since I’ve started messing with robotics that I wanted to build a tank, and finally that moment arrived when two Tamiya thread kits and a Twin Motor Gearbox arrived.
this is my attempt of making this bot autonomous.. obcessed with walls… a wall racer!
post 2009 01 31
post 2008 12 28
After completing the new motor driver board, now I feel ready to continue with the development of this bot..


For now it´s just remote controlled, but it will have some intelligence soon.
I will try to add microphones and use them as sound sensors. If I add for example 4 microphones, one on each side of the bot I could detect where does the sound come from and make it move in that direction, then add a couple of distance sensors to avoid obstacles..
My living room seems to be too small to drive this bot..
see it on MAKE :]



I´ve added two ultra sound sensors and now I´m trying to make this bot a wall racer. Due to its drifting capabilities it’s being very hard to code this, but I will find a way to do that.
I´ve replaced the 4 AA batteries by a small 7.2V battery and now he has more power which also means more nerves.. :D
…
So, after a couple of hours of trying and trying, I quitted, and decided to relax and enjoy some drifts..
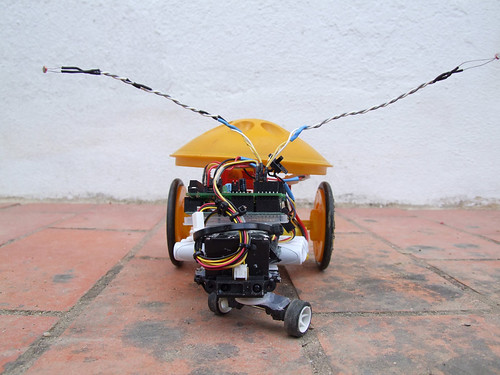
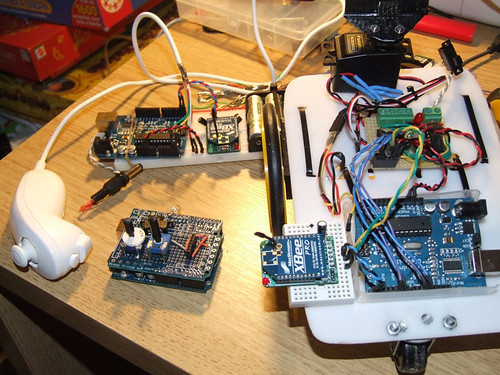
This is the ratb0t, he has a nervous behavior and remainds me of a rat.. :]
I´m using an Arduino Diecimila to control the steering servo and the traction motor.
The XBee module receives data from another Arduino, this one has a wii nunchuck controller attached.
Next Step: make it autonomous
| Update: I forgot to tell a little story about this little and nervous fellow. One day my mother told me she had one hair-removal thing broken (Braun Silk Epil brand ), and she said that she would bring it to me so that I fixed it. Of course I accepted, but I must confess, I never ever tried to fix it :) This made me think a lot on how could I twist it and use it to give life to a robot. The most difficult part was to transform the front blades onto a wheel, I did it using pieces of bike air-chamber, rubber and hot glue. Shame on me because I didn´t document the building proccess.. I will try not to repeat it :) If you have some interesting mechanical broken items I accept them :) |

– – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – –
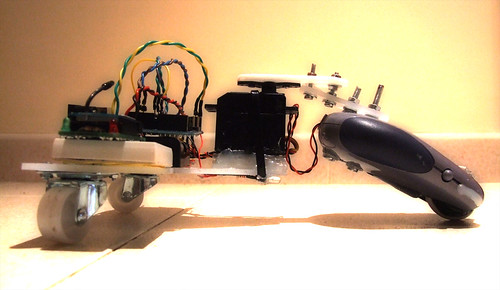
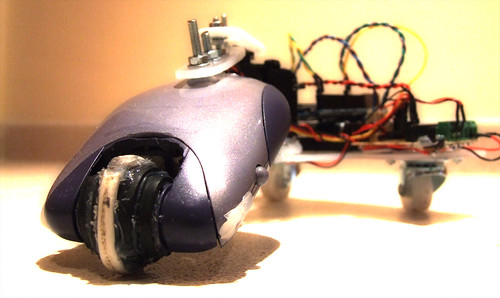
I wanted to keep working with the XBee modules, and I thought it would be cool to control Farrusco.
So, first I used 2 potenciometers and assigned one to each motor.. and then I used a nunchuck controller.
Both require a learning curve and it’s only after a while that you start to feel the touch :]
This is the code I´m using to control the robot with the Nunchuck
Build It. Share It. Profit. Can Open Source Hardware Work?
My Snail bot is on WIRED Magazine!!! Amazing! :D

WIRED Magazine wrote an excellent article about Arduino and open-hardware. My Snail bot is one of the four applications featured in the article.
I found some SEVERE problems. They didn´t place the sensor antennas in the correct position.. and its author name (me) isn´t featured anywhere.
But what the heck.. my “Snail Light Seeker” is on WIRED, together with ThingM and Adafruit produts :]
It´s a very interesting article and a must read:
WIRED Arduino Article Link

Ibero American Countries gather to diffuse digital boundaries, and to avoid digital exclusion.
Astronomy, Robotics, Innovation, Creativity, Modding and Digital Pleasure were the main areas where participants could share their knowledge and experience.
I went into the Robotics area, all the participants were very nice, I´ve met lots of interesting people from ibero-american countries. And there were really amazing Robotics projects!
One big thanks goes to Leonel Moura, he was the one who sent me the link to this event, and another big thanks to Alejandro for inviting me.
I will return to Portugal on Sunday, with a nice felling of hope for a better and unified world.
It was a great event!
22 robots, called skybot were built by the participants, one robot for each country and the final result was really amazing! Congratulations to all the participants! It has been a pleasure!
Robots can make this world a better world !!! :]
While coding new interactivity into this robot and trying to achieve better control on the way it moved, I thought it would be cool to see what happened if I mounted one little servo to hold a pen and asked it to write ‘LMR’ – the initials of the website: www.letsmakerobots.com
The idea came from this challenge… and I thought I could give it a shot.


The result was far from what I expected.
The pen was not centered on the chassis.. the correct position for the pen should be exactly between the wheels..
At the same time, it was nice to see this little creature drawing lines on its own :)
This is what could be drawn if the pen was centered.
I have a lot of difficulty keeping right angles everytime I move on to the next letter.. :)

I used an old toy motor and platform, then added two LDR light sensors, a SHARP infrared sensor on the front and Arduino Diecimila for the brain.


—————————————————————————-
11-11-08 UPDATE:
My Snail bot is on WIRED :)