This project is a collection of experiences related to seeing and percieving the world from the point of view of robotic creatures. Robots will send sensor data to the computer and will generate visual and audio landscapes in real time.
The development started during the Audiencia Zero residency in O Espaço do Tempo in Montemor-o-Novo, and will continue until the final exhibition wich will be in July.
This is a colaborative project where many friends are bringing together their skills, until now we have collaborated with:
– Pedro Ângelo with Serial Communication;
– Rui Madeira with computer vision technics and advanced maths;
– Sérgio Ferreira is a media and interaction guru, always providing precious help and advice;
– Daniel Gomes is working on a MAXMSP interactive sound;
– Nuno Morgadinho is developing an online application to remotely control robots.
– André Almeida is a computational guru and a great technology and interaction advisor.
More to come ;)
Sub-projects list:
This is the first iteration of this project, and just a quick test for something greater.. hope to have time for it in the future.
Components list:
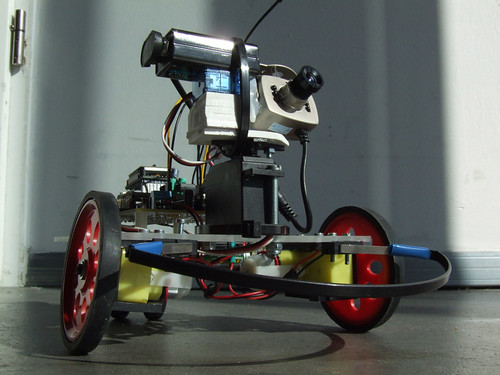
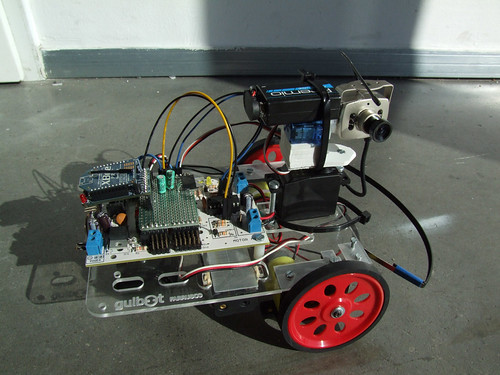
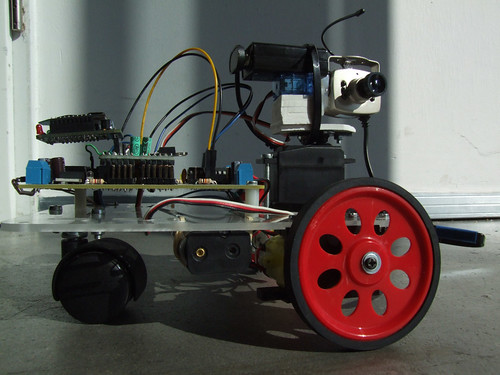
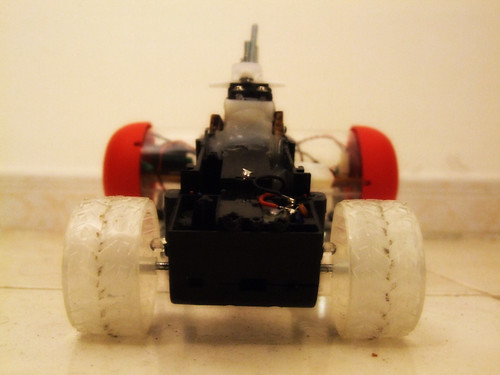
– Motoruino (Arduino compatible board) up and running;
– Wireless camera and video converter sponsored by O Espaço do Tempo;
– Basic pan/tilt system built with PVC;
– GUI written in Processing enabling robot remote control, gives vision feedback and servos orientation.
SOURCE CODE FOR ARDUINO AND PROCESSING