About the controller, I want it to have something we see in the drone industry, a controller with the screen, all-in-one. There is always the option to connect the receiver to the TV, but I really want it to be standalone, independent of power wallets, just something that I can carry anywhere I go.
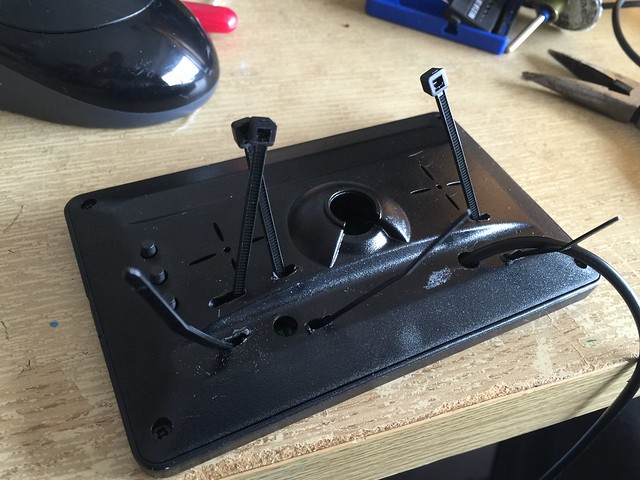
First step was to find a way to hold the screen to the remote, so I added zip ties to the back of the screen.
I also added a compartment to hold the receiver, battery and wires (collecting acrylic stuff is a good habit I guess)

Not bad..

The back side is still messy, but I will live with it for now.

and it just works..