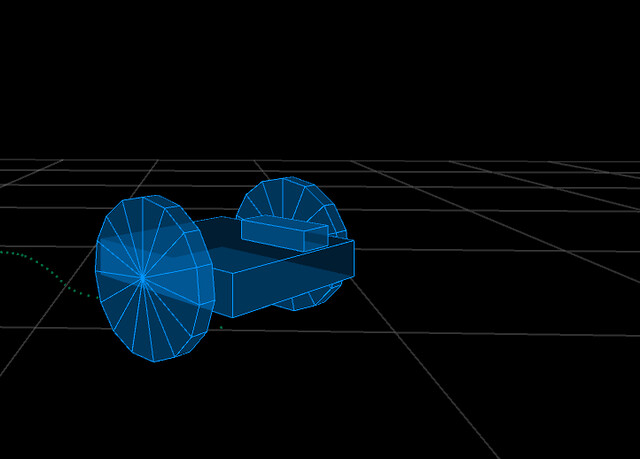
This Processing application is ment to simulate a differential wheeled robot, very used nowadays. This app will be usefull in our Robotics Workshops!
I missed the github class so here it is the good’old zip
Here’s the link to the repo, you’re welcome to contribute ;)
There are still a couple of enhancements on the list:
- real metrics and scale
- connect to motor encoders
- record a path on the virtual world and let the real robot follow it
- become real simulator of the arduino code used in our robotics workshops
The video is reproduced a lot faster than the program really performs :p
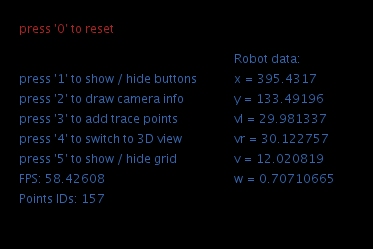
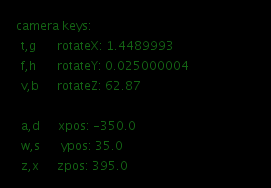
Some control keys are available:
The overall program is quite simple to use, just pass the mouse over the joystick area to control the bot.
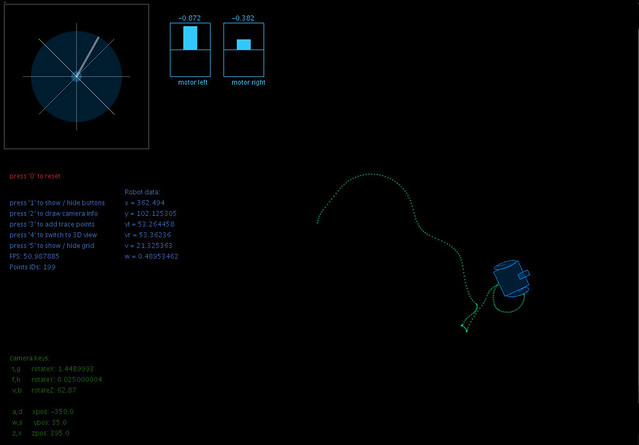
The program basically maps joystick values X and Y to a differential drive system where two motors are used to drive a robot.
There is also a representation of a robot and its path according to the motors differential rotation.
Credits:
The joystick program was based on a program entitled ‘JoystickSimulation’ by: Vince Thompson
http://diyroboticslab.wordpress.com/2009/06/17/joystick-simulation-with-processing/
The robot program was based on a program entitled ‘Kephera Simulator’ by Adam Matic of Croatia
http://gritsgroup.org/robotsimulator.htm