
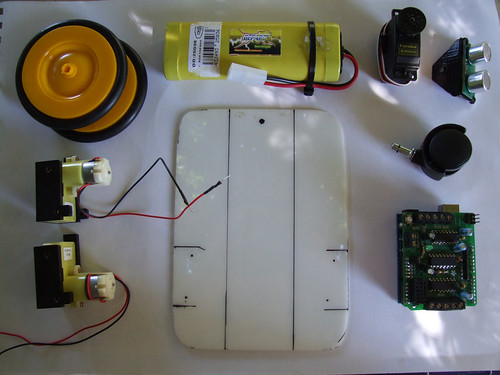
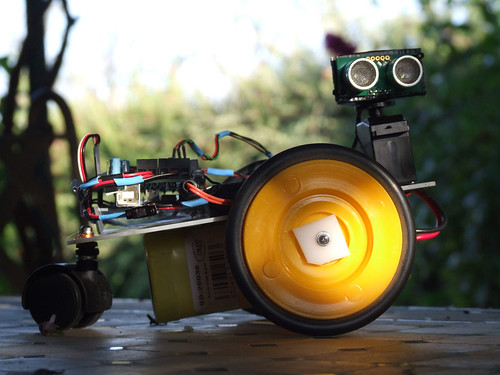
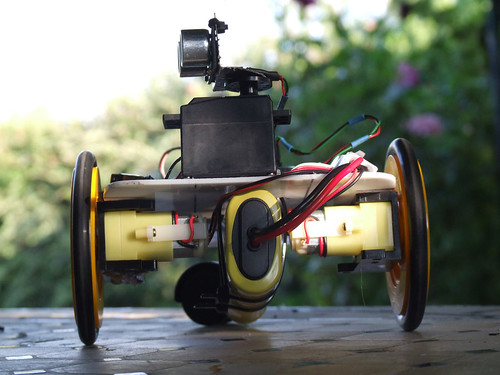
With a better understanding of robot building and navigation programming I came up with this robot!
I think that the great improvement here was that I’ve made a plan of what I wanted to build and looked after solutions before the assemble process. So, this one came out a more successful robot!!
This is my first real approach of avoiding obstacles and navigation programming and I’ve had a lot of fun with it! Nevertheless, the values that return from the sensor fluctuate a little and I need to work on it!

great job…
can you give dimension the base ??
thanks
Hi! thanks! : )
I don´t have the bot with me right now, but I will post it as soon as possible
sorry for the delay, the dimensions are 18 x 13 cm
How much did it cost??? I would love to make a robot like that!
THIS IS VERY GOOD PROJECT, CAN YOU GIVE ME THE IDEA FOR IT, BECAUSE I WANT TO MAKE IT FOR FINAL YEAR PROJECT,