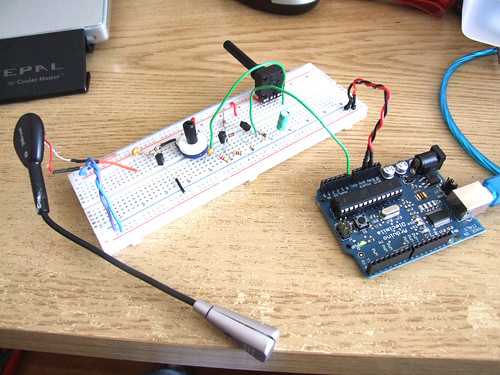
Lusorobotica.com and EmbeddedDreams.com made a challenge to build a robot only with one servo, and this was what I came up with.
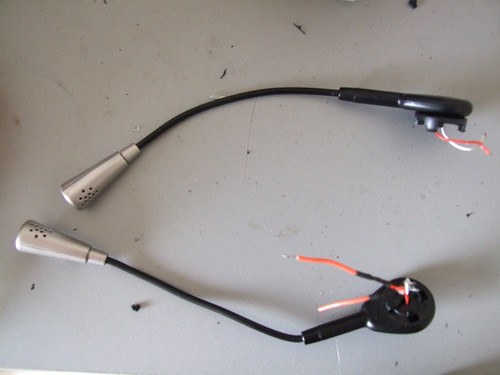
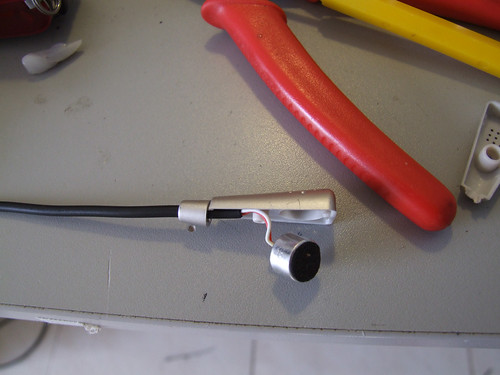
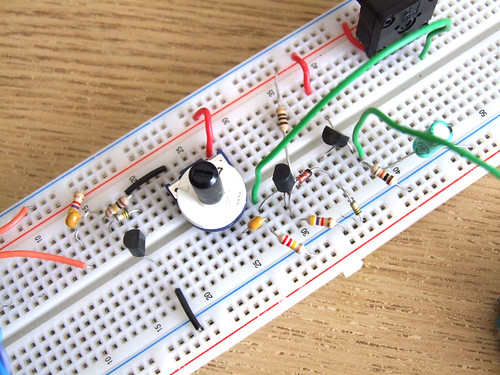
I used the sound sensor I’ve done a few days ago and a little paper-boat + a servo and a box and this is the result :)
This how the puppet works:
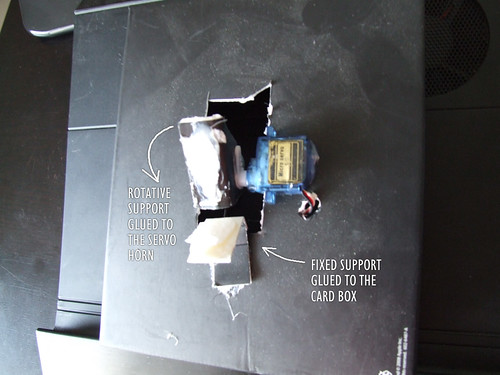
A hole was digger on a card box, and the micro servo is glued to the box as you can see.
One piece of paper is glued to the servo horn, and this will make the puppet talk movement.
Another piece of paper is glued to the box and it will be fixed and hold the puppet.

This is how the puppet is glued to the paper supports. ;)