This is the final result of the first stage of this project. An installation where zezinho calls for visitors and when a visitor reachs the mixing controllers he waits for new poses.
If you are nearby Lisbon, you can visit zezinho until 9 of July at: FABRICA FEATURES Lisboa. Rua Garrett, nº83 | Megastore United Colors of Benetton, 4º andar | 1200-203 Lisboa
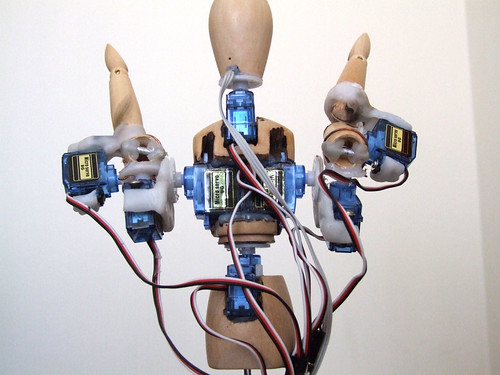
This is Zezinho, a humanoid robot that likes to pose! :)
All the microservo supports where made with the amazing material Polymorph.
For now he is being controlled by 8 analog inputs, each input controls one microservo. In the future (as I hope) he will be controlled by a computer vision system where he will try copy real human poses in real time.
I’m still programming servo control functions and movements presets.
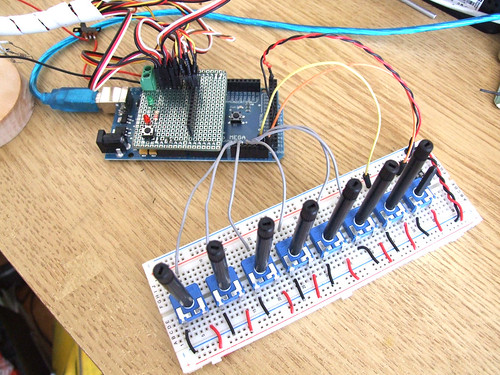
This is the analog inputs setup and a custom servo shield.
I’m using an Arduino Mega because I need more than 6 analog inputs that the regular Arduino boards have and I don’t have the time (or should I say patience) to digg around multiplexers.. I’m very lucky to have the support of InMotion.pt, they sent me the Arduino Mega for the first test drive. Thank you so much Filipe!! ;)
This robot will also be my final project for the course ‘O Som do Pensamento’. It will be an instalation where the user will be able to control his poses with physical controllers. I’ve made a controller box in acrylic and will post photos as soon as I have it with me.
Playing with movements and poses.
Testing movements and different servo speeds.
________________________________________________________________
Update (21.08.09)
Other posts related to Zezinho: