Since the first SWARS experience, I knew this could go A LOT further, but having Farrusco on a remote terrace where you could only have access by climbing an outside ladder.. I must confess, I never thought of such a thing, until… my friend Fernando Mendes (Cowork_LX) came to me with this crazy idea!

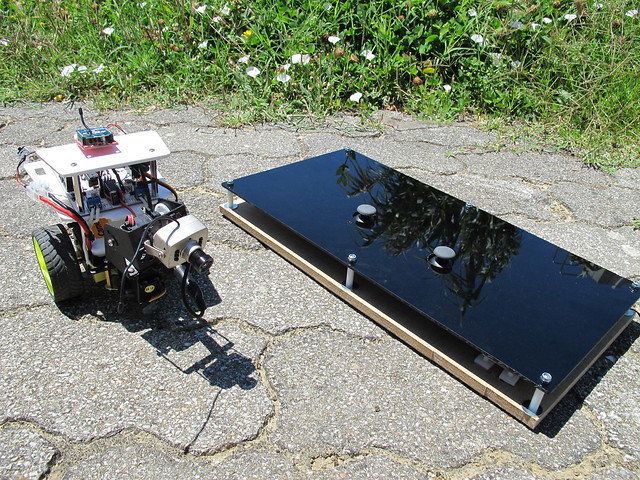
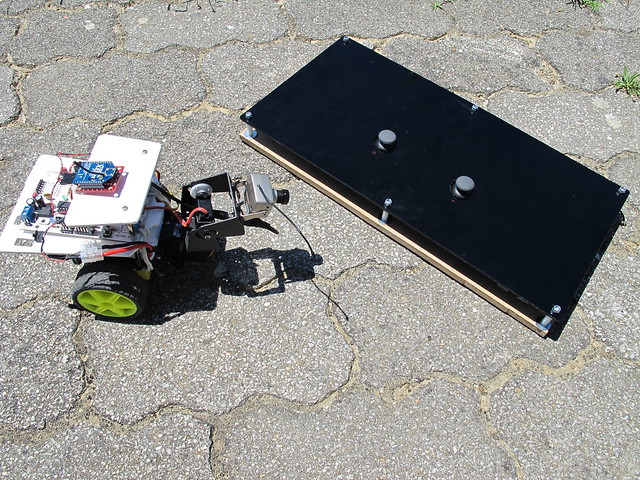
I loved the challenge, and wanted since the first moment to create a cool and easy to use physical interface and it came out a nice piece IMHO.
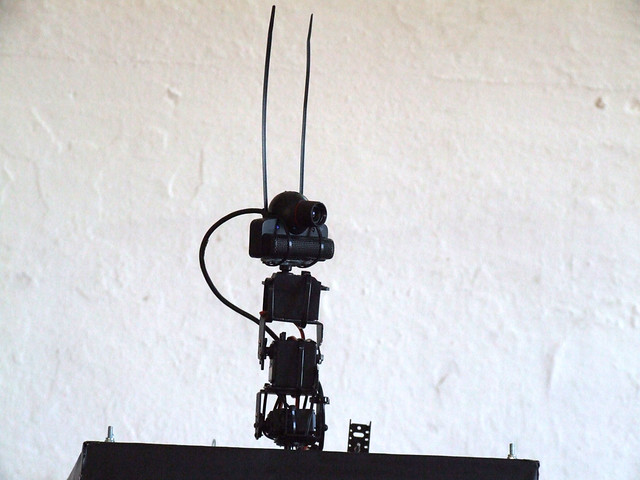
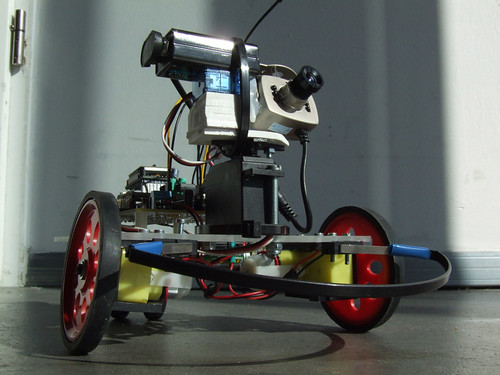
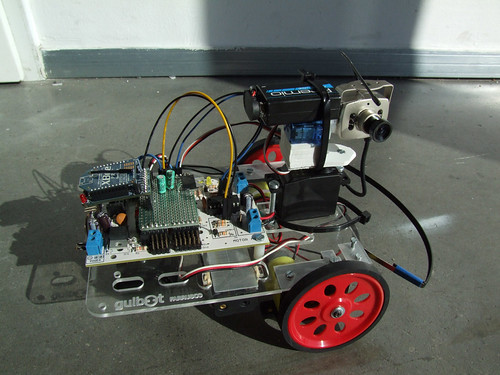
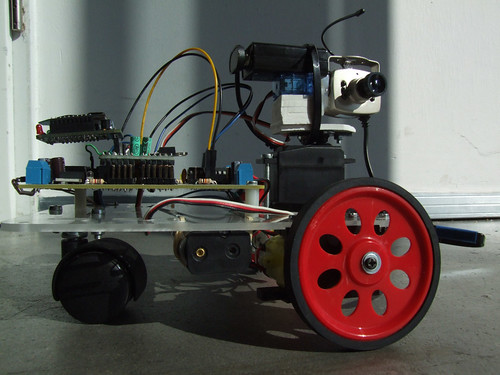
Then Farrusco with the wireless cam already built in for the first “Driving Farrusco” experience, I used two packs of batteries to enhance the play time (one battery pack is missing in the photo). This small wireless camera needs a lot of juice, and a little 9v batteries doesn’t feed it for to long, besides that it gives a very weak transmission with lots of interference, but with this 9.6v racing pack, it worked out really good!

And finally the video:
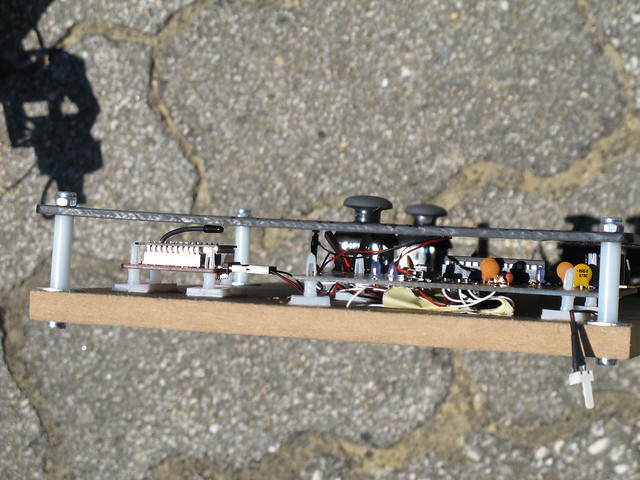
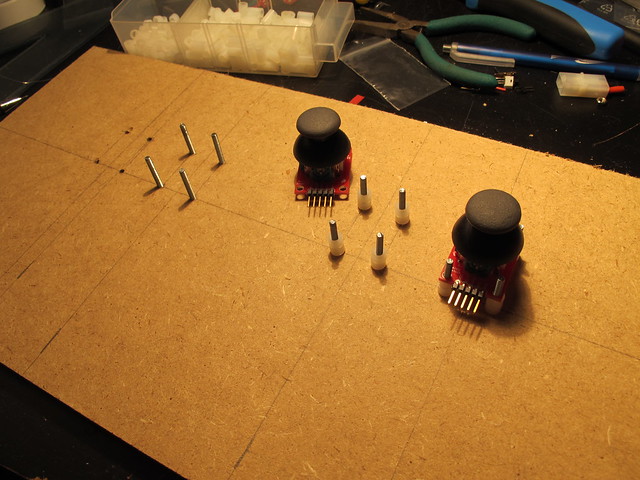
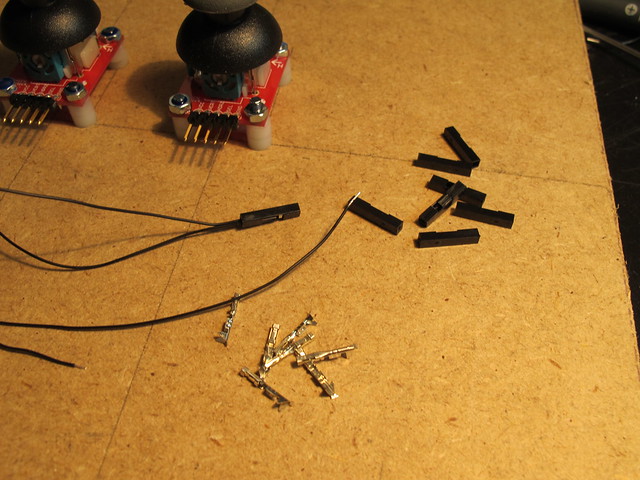
Some bits around the controller:
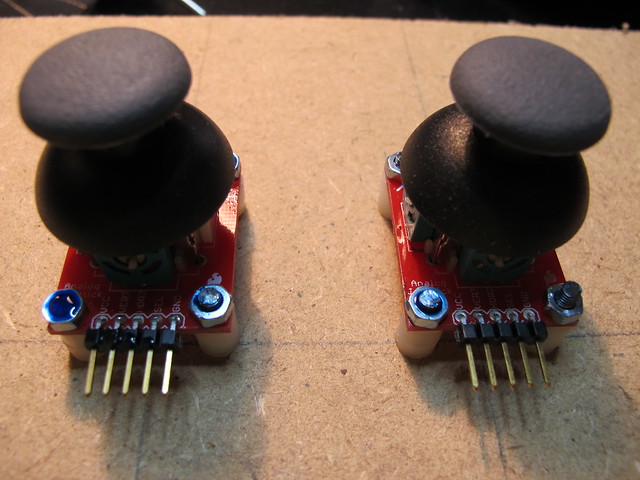
At the beginning I wanted to have four joysticks, one for each motor, one for pan and the other for tilt the camera.


 \
\
It ended a bit complicated to operate and a learning curve was needed to get used to it, because this was going to manipulated by many people it needed to be simple and fast to learn.

[ FOTO MISSING showing the end result with two joysticks, a motoruino only with the necessary components and the xbee mount ]