This is the ratb0t, he has a nervous behavior and remainds me of a rat.. :]
I´m using an Arduino Diecimila to control the steering servo and the traction motor.
The XBee module receives data from another Arduino, this one has a wii nunchuck controller attached.
Next Step: make it autonomous
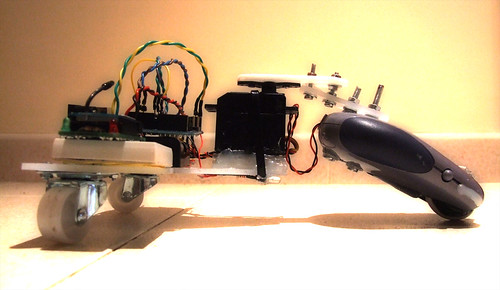
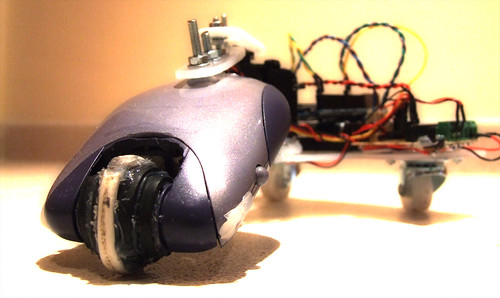
| Update: I forgot to tell a little story about this little and nervous fellow. One day my mother told me she had one hair-removal thing broken (Braun Silk Epil brand ), and she said that she would bring it to me so that I fixed it. Of course I accepted, but I must confess, I never ever tried to fix it :) This made me think a lot on how could I twist it and use it to give life to a robot. The most difficult part was to transform the front blades onto a wheel, I did it using pieces of bike air-chamber, rubber and hot glue. Shame on me because I didn´t document the building proccess.. I will try not to repeat it :) If you have some interesting mechanical broken items I accept them :) |

– – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – –
Cool robot!
Could you post the code for this? I’ve been trying to get my xBee communications working for a while, but am having trouble reading the strings. It might help a lot if I could see how you did it.
Hi, thank you for the words! :-]
Take a look into these examples
http://lab.guilhermemartins.net/?p=346