Motoruino page: www.guibot.pt/motoruino
It´s since I started with robotics, that I felt the need of having a board where I could directly plug-in my motors, servos, sensors and all the stuff without having to purchase extra shields, or building pcb’s and soldering and troubleshooting and hours and hours of hard labour.. so, I decided to start designing a new Arduino board. When I mention design, I didn’t actualy design the board in cad software, this amazing task was accomplished by my friend David Palma.
We talked a lot about usability, electronics and how to introduce robotics to newbies, and this is the first batch we ordered. We are working on a new batch with more layout improvements.
Main key words:
– easy to use, understand, play with;
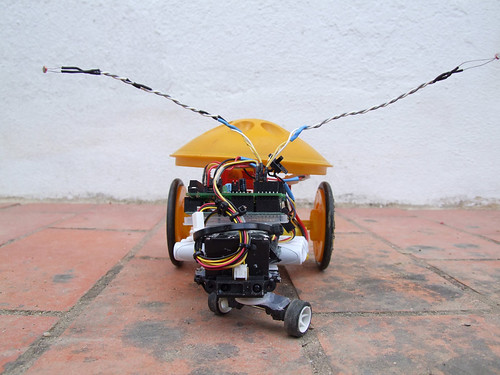
– must be a plug-and-roll board;
– to be suitable with shields, and with regular Arduino Diecimilla/Duemillanove boards;
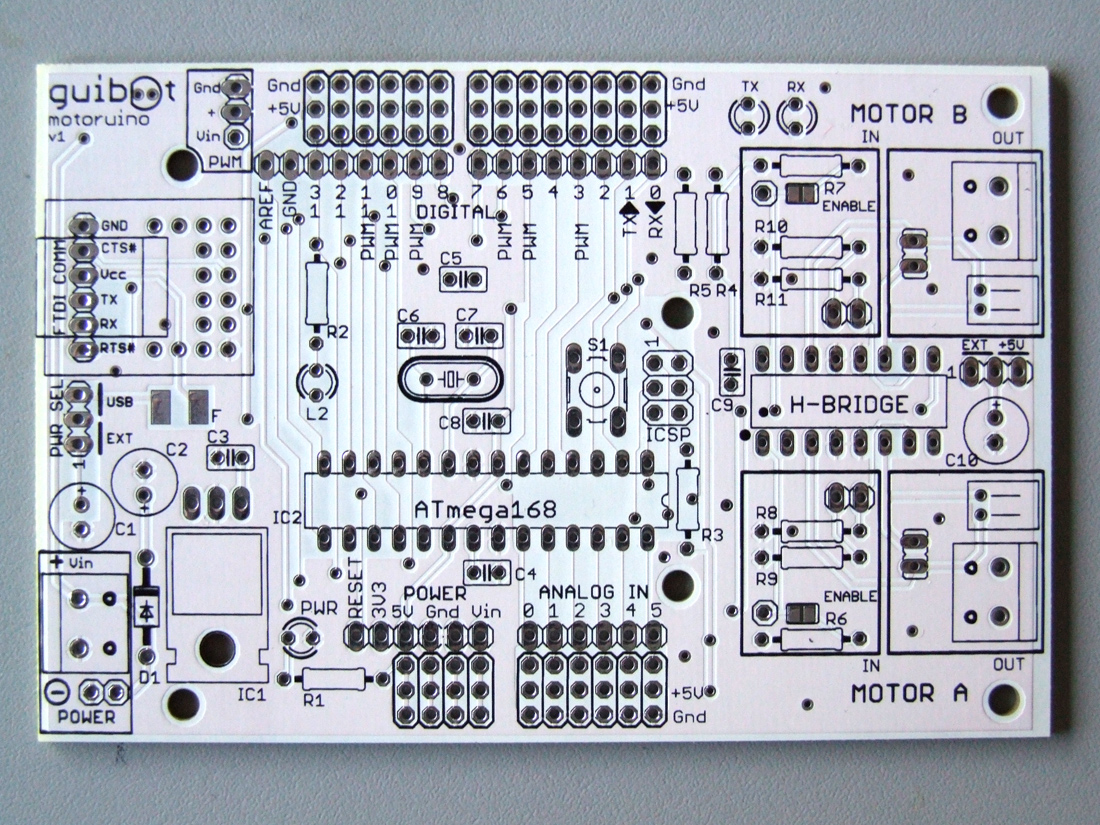
– the usage of the H-Bridge is open, i.e., there aren’t any Arduino output pins assigned, the user can use the bridge the way he/she wants;
– motors supply and PWM pins might be used with external voltage or regulated 5 volts
– motors have 3 different connectors, screws terminals, male headers, JST connectors
– two possible FTDI/USB connections available:
1. USB / TTL convertor, there are some choices on the market for this one, you can have it in the form of a cable, or in the form of a small pcb
2. USB adaptor with the FTDI chip embedded
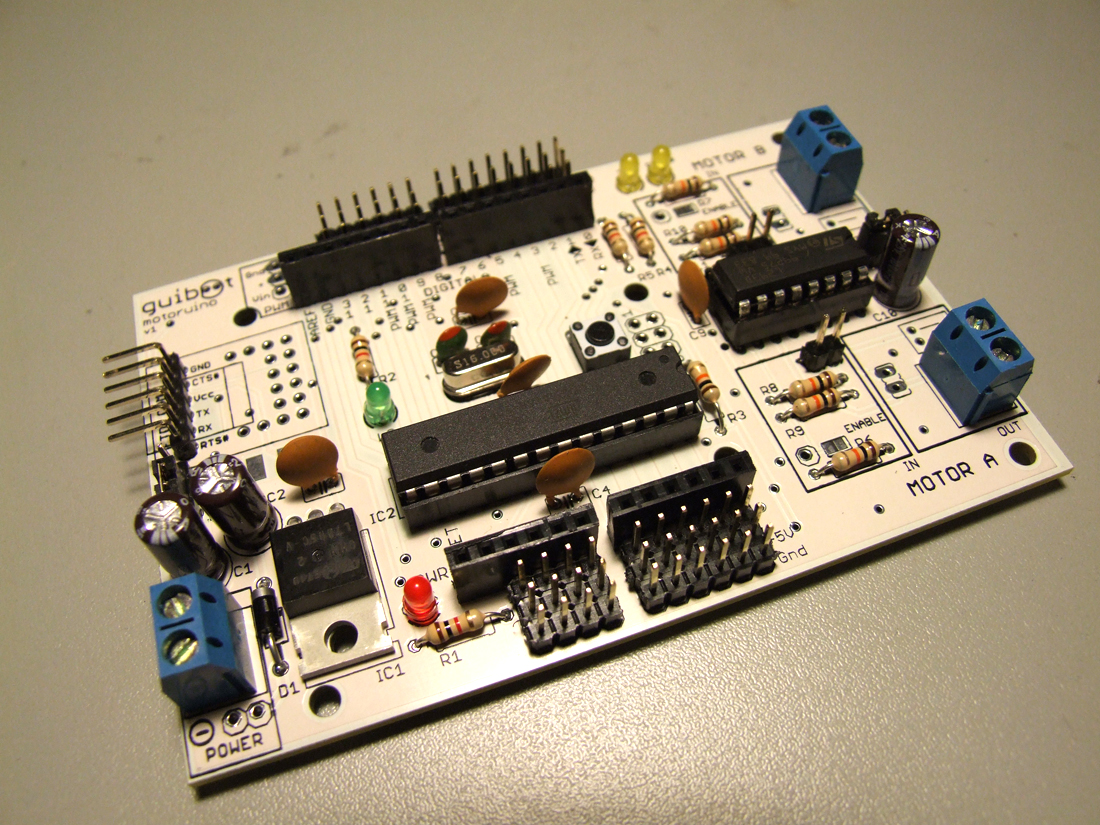
The board fully assembled is pretty neat and clean.

Next batch will be in black :)