Farrusco is a small robot based on the Arduino platform, in this case, is using a Motoruino wich is inspired on the Arduino but with a couple of enhancements – dc motor dual controller, servo and sensor plugs.
With Farrusco you will be able to make it avoid obstacles, follow walls, enter in free space mode, and in the future more add-ons will be available, just to name a few: line follower, speakers and light sensors, RGB leds, and so on.
This robot is intended to:
– enthusiasts wishing to enter in the creative computing and robotics fields but don’t know where to start;
– engineering and physical computing students who need a development platform;
– digital artists and designers;
– students of all grades;
– be a simple toy.
The motoruino is so easy to setup, just plug the motors, sensors, upload code and your bot is ready to go.
I added a big capacitor (4700uF) on the PCB power connections as I had the Motoruino resetting randomly when a motor started (OddBot explains everything here)
This is a quick test drive with the demannu (unnamed bot).
I’ve found this two rc vehicles on a junk, they are in a very bad condition. The big one has the DC motor burned out, I will try to replace it.. brushless motor maybe.
They both have two different gear mode (hi and low speed), I am wishing to try it out.
This is the dead motor..
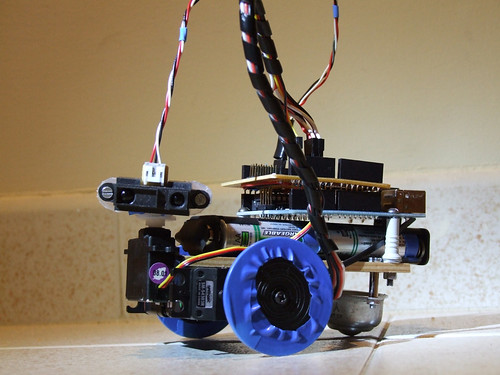
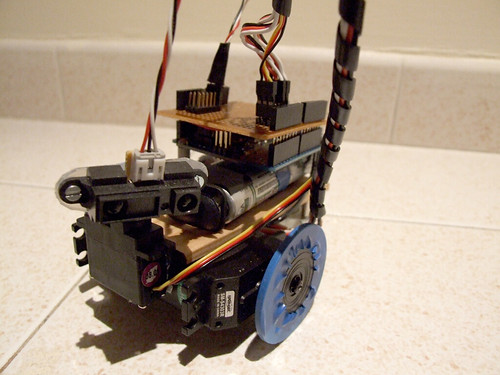
The small car doesn’t have the rear suspension, I could try to rebuild it but I wanted to try something different with this one. I want to go for a chopper tricycle style :D
It’s a bit weirdo, and I’m very unsure if this will work, but I will give it a try.. If it fails, I want to try with one of the original wheels on the front, the reason I didn’t try is because I don’t have a way to hold the front wheel right now, I must look on a hardware store for a strong wire and it is 2 AM right now.
Is much stylish this way, definitely, this way it would be an all terrain tricycle!! :D
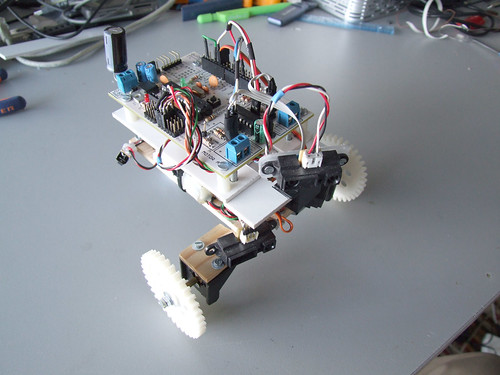
It’s been quite a while without building robots… errr.. creatures..
anyhow I’m releasing this new creature, wich is still a work in progress.. and since I can’t think on a name for it, I will call it demannU, witch is “unnamed” backwards… sounds like ‘demon’, and for the sake of insanity, it looks like a little demon..
the wheels where designed by Catarina Mota, and if you go to thingiverse, you can download the source code, and print your own wheels if you have access to a 3D printer
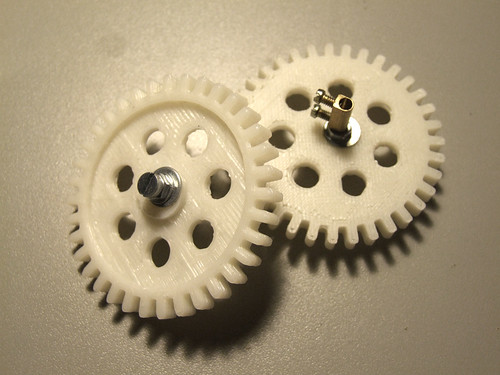
pololu mini gears, i strongly advice this motors, very powerfull and fast
this bits will be the motors supports
and after some dremel work they look nice and ready to hold the motors
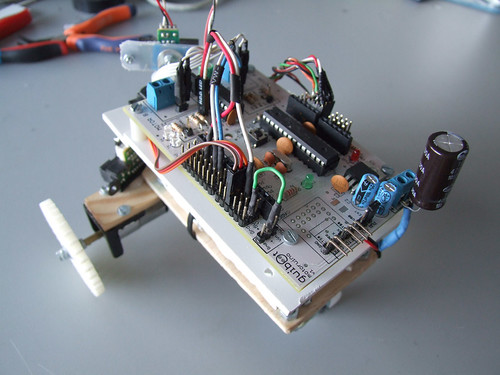
the chassis, this time I wanted to try wood, it’s quite good to work and to do fast prototyping
et voilá
It isn’t finished yet, but I wanted to share with you :) will add more sensors and more cool stuff as soon as I have time
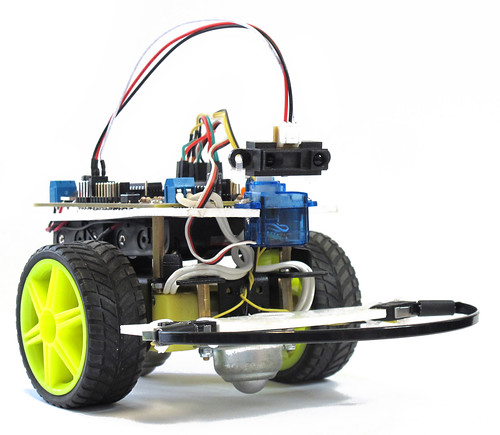
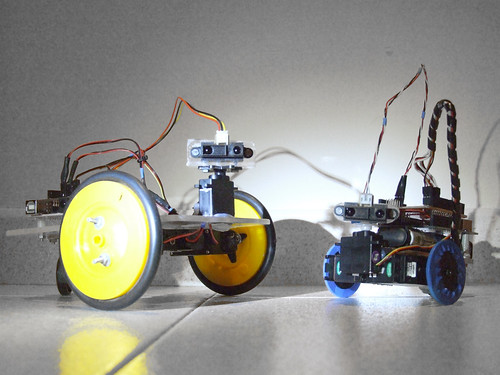
May I introduce you to the new family members: Farrusco v2.5, and Farrusco Junior.
Farrusco v2 is the new generation of my first robot Farrusco.
The F2 was created with Filipe Valpereiro from InMotion.pt, and this was the robot used for the last robotics workshops season.
The F2.5 version has a cleaner design, we are using two modified servos to work as DC motors as you can see in this tutorial, the motor driver is an ardumoto, and soon I will upload more photos with new addons.
Farrusco Junior is another iteration, he has two modified servos and a small chassis. The modified servos operate as normal servos but they rotate 360º continuously, and you can learn howto hack them watching this video tutorial (in portuguese).
This robot is still a work in progress, and I will upload new pics soon.
This is my first experiment with the MakerBot. I am totally thrilled with this machine!!!
(photo by Tiago Serra)
SSS (servo suspension system) is designed to support standard servo motors and act as a basic suspension. It is still a work in progress and has not been tested yet.
Will update results as soon as possible (still waiting to have my lab back).
This is the final result of the first stage of this project. An installation where zezinho calls for visitors and when a visitor reachs the mixing controllers he waits for new poses.
If you are nearby Lisbon, you can visit zezinho until 9 of July at: FABRICA FEATURES Lisboa. Rua Garrett, nº83 | Megastore United Colors of Benetton, 4º andar | 1200-203 Lisboa
OddBot is going to China, and he created several packs with robotics stuff and came up with a great creative challenge wich is to create a video with the keyword FUN. One of the extra points was to build something with paper, wood, and cheap materials, no techy thing here, the main purpose was to spend a great time creating a cool video to make others laugh. The other extra point was to build a PCB with non PCB materials like, paper, card, or any other thing, I’m so happy to know that paperduino was one of the inspiration to this competition.
“el sapatero” came with this great challenge in mind, and I wanted to build something really nonsense.. and started to play with stuff I have, and my wife appear with this silly boots made out of recycled card. This card boots(?) are used inside shoes to keep their original shape and I knew in that precise moment that I have to use them! :)
and the video for the challenge: http://letsmakerobots.com/node/8630
This was the first layout. I thought that I could build some kind of a walker… but I was wrong :D
This is a motor plug made with polymorph..
Polymorph plugged into the motor and with a plastic bit.. (can’t explain this in english) lol
The polymorph structure was shaped in a way that gives fully support to the card boots.
This is the circuit, I wanted to try other non conventional PCB materials, and this time I tried with acrylic. I kinda like it.. its different… but not an easy task.. I don’t know how many hours I spent with this..
It was a great disapointment when I saw that only the body spins.. and the boots remained still.
So I have to create another polymorph structure to give some traction to the entire system.
1st test drive
And the final result :)
I used hotglue to reinforce the card. And this makes a cool accoustic sound coming from the boots :)