Aqui vai a tradução à muito esperada deste tutorial, espero que vos seja útil.
Decidi remover a Ponte-H, o motor agora está directamente ligado às pilhas AA e o Arduino é alimentado por uma pilha de 9V. Este pequeno robot apenas anda em frente (para já).
Na 2ª parte vou adiccionar a Ponte-H e dois botões Bump. Assim o nosso pequeno robot poderá evitar obstáculos mudando de direcção.
Few days ago I started wondering how could I make a Radar Simulator with Processing.
I have already placed an ultrasound range finder on a servo motor and sent its data into the radar program, one video will be posted soon.
Now I want to have my wireless communication module setup complete and working on a robot, and I can have the sensor data being displayed on a screen as the robots move around the space. This will be a visual reference of the robot perception, it is also a good exercise of physical computing.
This applet simulates the sensor data through the Y mouse coordinate, have fun :]
While coding new interactivity into this robot and trying to achieve better control on the way it moved, I thought it would be cool to see what happened if I mounted one little servo to hold a pen and asked it to write ‘LMR’ – the initials of the website: www.letsmakerobots.com
The idea came from this challenge… and I thought I could give it a shot.
The result was far from what I expected.
The pen was not centered on the chassis.. the correct position for the pen should be exactly between the wheels..
At the same time, it was nice to see this little creature drawing lines on its own :)
This is what could be drawn if the pen was centered.
I have a lot of difficulty keeping right angles everytime I move on to the next letter.. :)
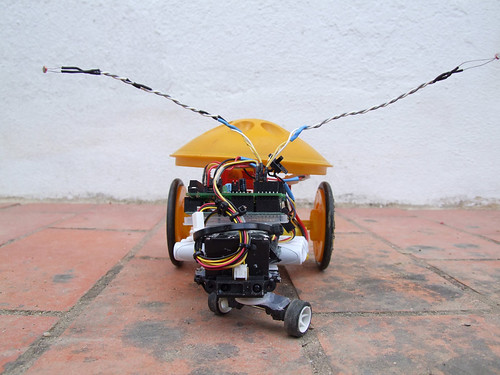
UPDATE: I decided to remove the H-Bridge part, now the motors are directly connected to the AA batteries, and the Arduino is connected to the 9V battery. This little bot will move only forward.
In Part II, I will add an H-Bridge and two SPDT Bump Switches. The robot will move in both directions and avoid obstacles.
I vandalized an RC toy and connected the motor wires to Arduino digital pins.
It only gives us 1´s and 0´s which means low control, but can be handy someday :)
This creature roams through the surrounding environment and seeks for light sources. When an object is too close it reverses motion and turns around, and then goes on seeking light.
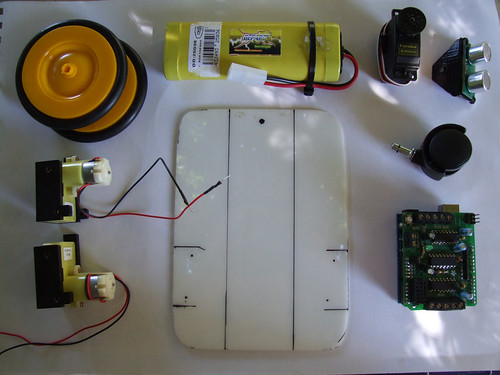
I used an old toy motor and platform, then added two LDR light sensors, a SHARP infrared sensor on the front and Arduino Diecimila for the brain.
With a better understanding of robot building and navigation programming I came up with this robot!
I think that the great improvement here was that I’ve made a plan of what I wanted to build and looked after solutions before the assemble process. So, this one came out a more successful robot!!
This is my first real approach of avoiding obstacles and navigation programming and I’ve had a lot of fun with it! Nevertheless, the values that return from the sensor fluctuate a little and I need to work on it!
Here goes my second robot. This turns out to be the 4th robot actually :)
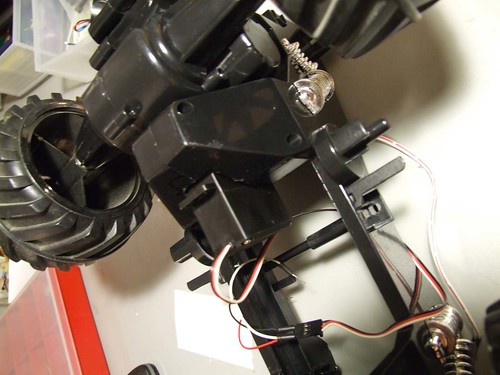
I found this offroad car in an old junk and it was love at first sight!
Now I want to add some brains and sensors and give him a new life :]
The steering DCmotor burned out and I’ve removed all the gears and stuff around it. I’ve made a hole and installed a servo motor to do the steering, it seems to work out good! I can´t post a video because the motor shield I was using burned out as well, now I’m working on a custom motor driver … (it seems I’m having lots of burning issues lately) :D
2008 – 09 – 22 —- update ———————————
My custom motor controller seems to work quite well! These videos show the servo steering.
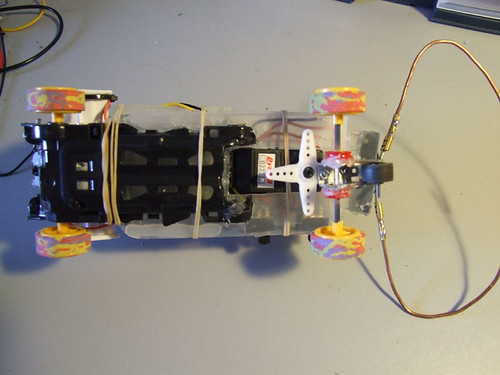
This was my first robotic experiment, I used an arduino and a motor shield with one servo for steering and a small dc motor for traction.
I didn’t have any cool sensors like infrared or ultrasonic at the moment, so I used two micro-switches to be like bug sensors. And I called it “baratinha”, a Portuguese word for “little cockroach”.
I´m so proud of my little Baratinha!! :] Thanks to João Silva for putting me up-to-date!
I thought this was a finished project… I was wrong!! :]
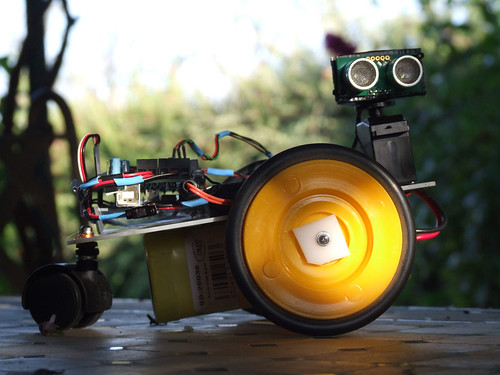
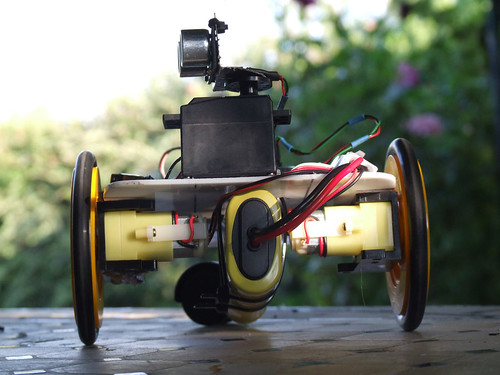
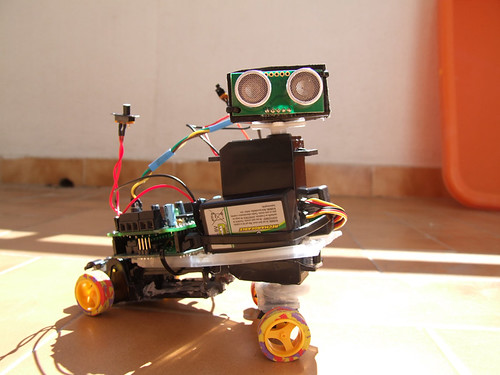
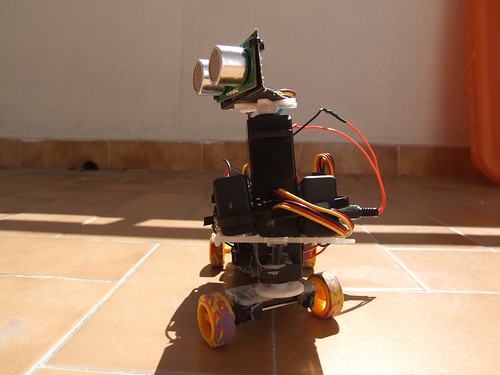
I’ve decided to change the structure and the geometry of the chassis. Now the gravity center is lower, which performs more stability. I’ve decided to remove the other power switches and put these smaller ones, one below the other, so that I can switch on all the system at once. And now about the ultrasonic sensor :)
I’m programming the navigation system, and it’s being another challenge for me! But I’m having lots of fun with it!!
I’ll be out for one week so see you soon guys! ;)
Just a final note: I thought that if I created a blog post and assigned it to my robot project it would appear in this page.. but it didn’t.. so, I’ll update only this page from now on..
I´m closing this project because the motor that I’m using is very weak and it doesn’t have enough strength to run with all that stuff. I’ll make a similar one with a stronger motor and bigger wheels, and with a better understanding of robot design!
It was a good way to start and I’ve learned a lot about hand crafts, physical construction, materials and programming. :)
I started this robot without any planning at all, I was just adding more and more stuff, and when a problem was solved, another problem was created, so this resulted very time consuming. It was something like adding something here and something there, then I didn´t liked it there so changed it… Now I must fix this because I’m thinking about a new way of doing it… so it was like a never ending project :)
The main purpose here was to build something, to understand how work some materials, like hot glue, and to program an interaction system.
The main purpose here was to build something, understand how some materials work like hot glue, and program an interaction system.