UPDATE: I decided to remove the H-Bridge part, now the motors are directly connected to the AA batteries, and the Arduino is connected to the 9V battery. This little bot will move only forward.
In Part II, I will add an H-Bridge and two SPDT Bump Switches. The robot will move in both directions and avoid obstacles.
Here goes my second robot. This turns out to be the 4th robot actually :)
I found this offroad car in an old junk and it was love at first sight!
Now I want to add some brains and sensors and give him a new life :]
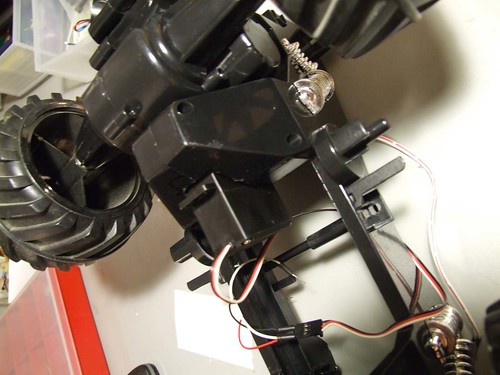
The steering DCmotor burned out and I’ve removed all the gears and stuff around it. I’ve made a hole and installed a servo motor to do the steering, it seems to work out good! I can´t post a video because the motor shield I was using burned out as well, now I’m working on a custom motor driver … (it seems I’m having lots of burning issues lately) :D
2008 – 09 – 22 —- update ———————————
My custom motor controller seems to work quite well! These videos show the servo steering.
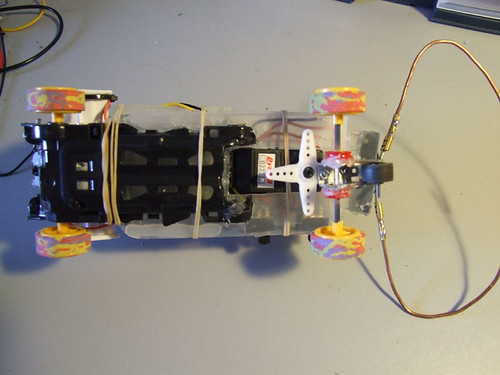
This was my first robotic experiment, I used an arduino and a motor shield with one servo for steering and a small dc motor for traction.
I didn’t have any cool sensors like infrared or ultrasonic at the moment, so I used two micro-switches to be like bug sensors. And I called it “baratinha”, a Portuguese word for “little cockroach”.
I´m so proud of my little Baratinha!! :] Thanks to João Silva for putting me up-to-date!
I thought this was a finished project… I was wrong!! :]
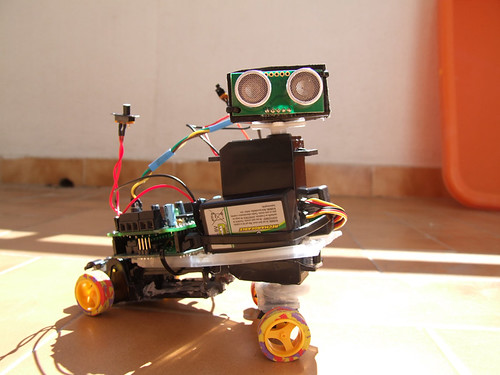
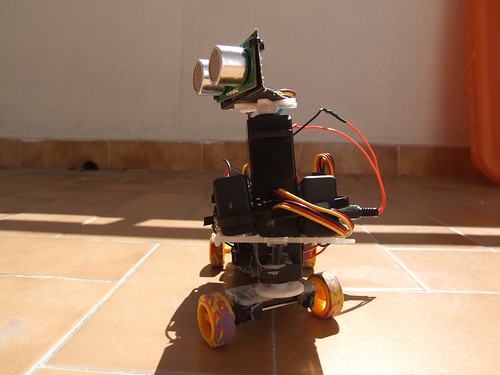
I’ve decided to change the structure and the geometry of the chassis. Now the gravity center is lower, which performs more stability. I’ve decided to remove the other power switches and put these smaller ones, one below the other, so that I can switch on all the system at once. And now about the ultrasonic sensor :)
I’m programming the navigation system, and it’s being another challenge for me! But I’m having lots of fun with it!!
I’ll be out for one week so see you soon guys! ;)
Just a final note: I thought that if I created a blog post and assigned it to my robot project it would appear in this page.. but it didn’t.. so, I’ll update only this page from now on..
I´m closing this project because the motor that I’m using is very weak and it doesn’t have enough strength to run with all that stuff. I’ll make a similar one with a stronger motor and bigger wheels, and with a better understanding of robot design!
It was a good way to start and I’ve learned a lot about hand crafts, physical construction, materials and programming. :)
I started this robot without any planning at all, I was just adding more and more stuff, and when a problem was solved, another problem was created, so this resulted very time consuming. It was something like adding something here and something there, then I didn´t liked it there so changed it… Now I must fix this because I’m thinking about a new way of doing it… so it was like a never ending project :)
The main purpose here was to build something, to understand how work some materials, like hot glue, and to program an interaction system.
The main purpose here was to build something, understand how some materials work like hot glue, and program an interaction system.
This was my final project at Restart in the course Digital Art and New Media.
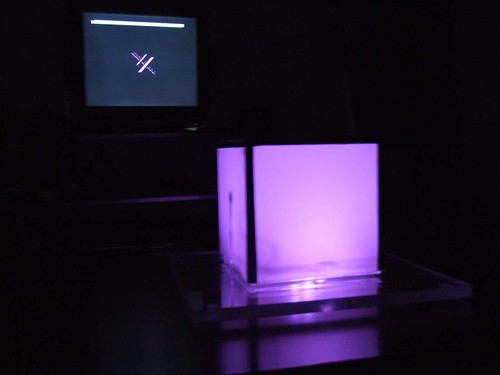
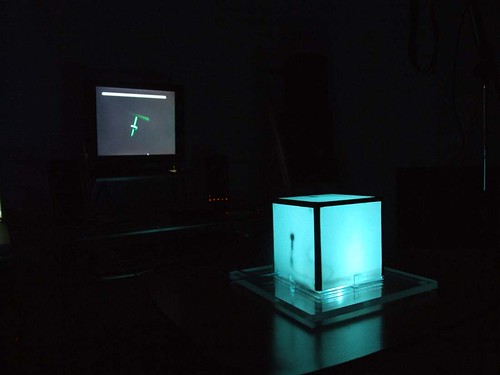
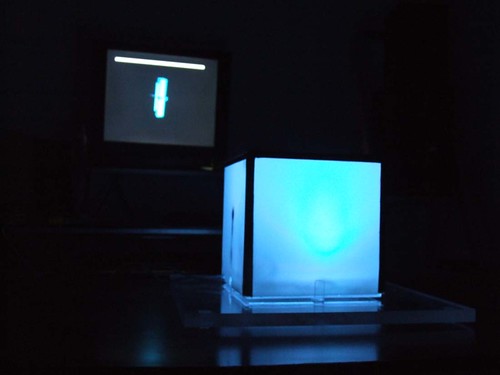
It is an Immersive Sound Installation where the visitor is invited to interact with a cube and to use it to experience sound.
The sounds are a fusion between recorded samples of native and ritual sounds and songs (Didgeridoo´s, Djambes, Shamanic rituals, Portuguese Traditional Songs from Miranda do Douro) and real time sounds generated by software synthesizers created in MAX-MSP.
By touching the cube faces the visitor changes sound tracks and enables / disables sound effects. In real time a projection is created and returns a reference of the sounds being played, at the same time that the visitor´s hand position is analyzed beyond the cube thus changing equalization and triggering more sound effects. The cube color and the projection color change when new sounds are triggered.
Special thanks to Pedro Pestana, André Sier, André Gonçalves and to all my classmates ;)