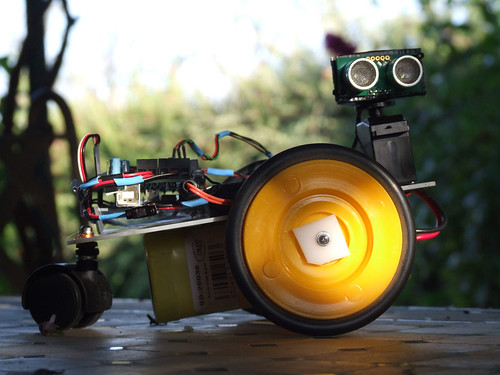
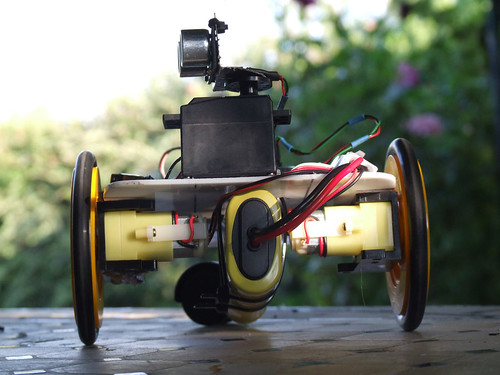
With a better understanding of robot building and navigation programming I came up with this robot!
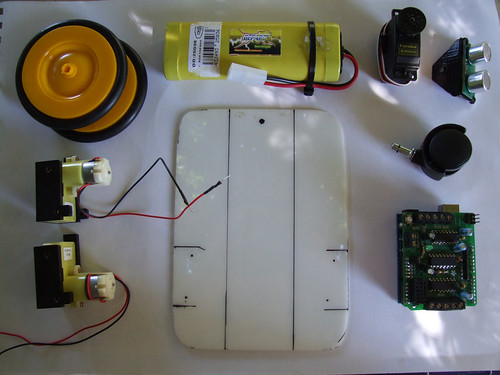
I think that the great improvement here was that I’ve made a plan of what I wanted to build and looked after solutions before the assemble process. So, this one came out a more successful robot!!
This is my first real approach of avoiding obstacles and navigation programming and I’ve had a lot of fun with it! Nevertheless, the values that return from the sensor fluctuate a little and I need to work on it!