ICU has been sleeping for a while but was awaken suddenly because I was invited to an exhibition at Flausina, a new born association in Lisbon.
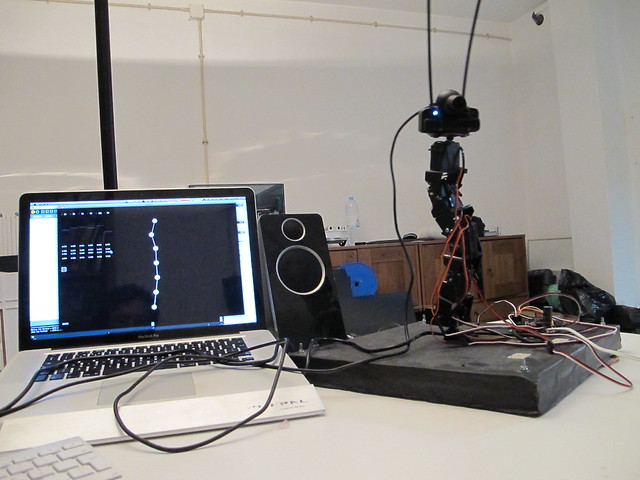
Complexity is always a welcome thing around here and the bot was presented with two more servo motors and all the software has been re-written. And because I needed to simulate its movements I coded an application in Processing in a way that I could test all the non-dangerous angles. Inverse kinematics is way to advanced for my taste and I think I can call this a “forward kinematics simulator”. This simulator gives also the possibility to generate individual sine waves for each motor, minimum and maximum range of motion, an interpolator for smoothness and frequency for speed.

Unfortunately I don’t have any decent video of photos of the Flausina exhibition, I leave you with a video of the bot in the office with the processing application.
TODO list:
– capability to save presets
– timeline with keyframes, play and stop buttons
– upgrade this servos to more powerful and digital servos
– upgrade all the structure to enhance weight distribution
– create a mask in silicon/rubber and give this bot a crazy new look
– everytime a face is detected it will say something on Twitter and upload the picture in an online gallery
Source code can be downloaded here.
All for now.. Roger, over and out.

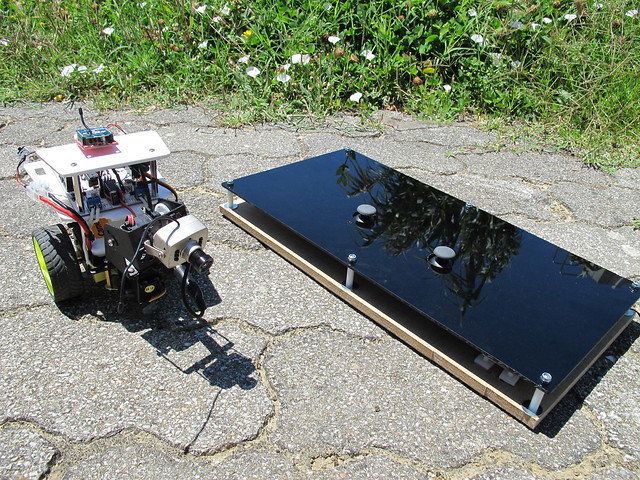
Photo at Flausina.