Inner’s Lair started with a crazy idea of having an immersive interactive installation that could gather many artistic and computational topics that we at Artica have been disccussing in the last months. So, mostly we wanted to tryout our new conceptual implementation of cool topics as immersive sound, computer vision, interactive robotics, and organic behaviors.

Meanwhile POP UP Lisboa 2010 came up and I was invited to apply a purposal for an instalation, and I thought that Inner’ Lair could be a great challenge for me and André Almeida, and a great opportunity to promote ARTICA interactive and technological solutions.
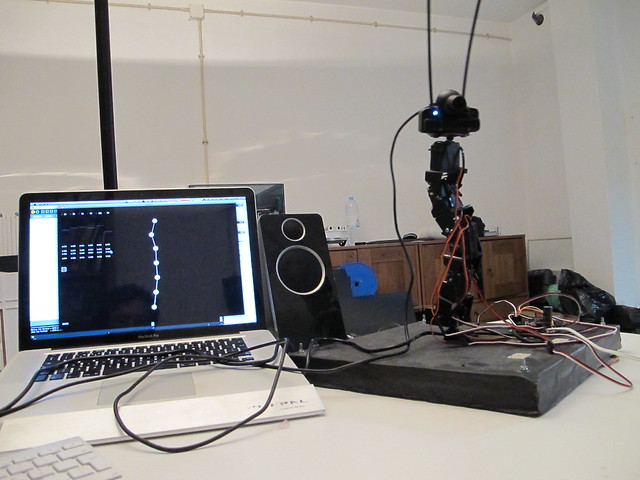
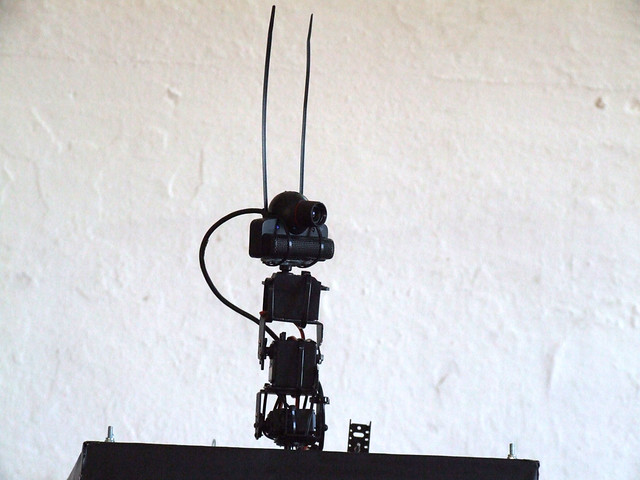
So, all the conditions where in place, we have this great idea and a great place to show it. Due to the complexity of the project we assume that it would be shown as a WIP (work in progress). This way we stablished several steps, to setup sound, all the set, computer vision system and robotics.
We will be all the saturdays (except 27th, wich we will be there in 28th) working on-site until the end of Pop Up. After the end of the event we intend to continue this WIP on another place. If you know a place to show this creation we will be glad to know.
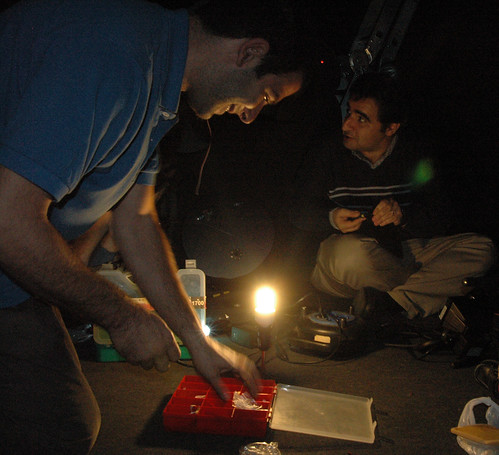
This saturday (13 of November) was really fun, we had a lot of friends passing by willing to give us a hand, lots of visitors asking what we where doing, we had such a good time.

This is the current state of Inner’s Lair, robots still don’t move, but they will ;)