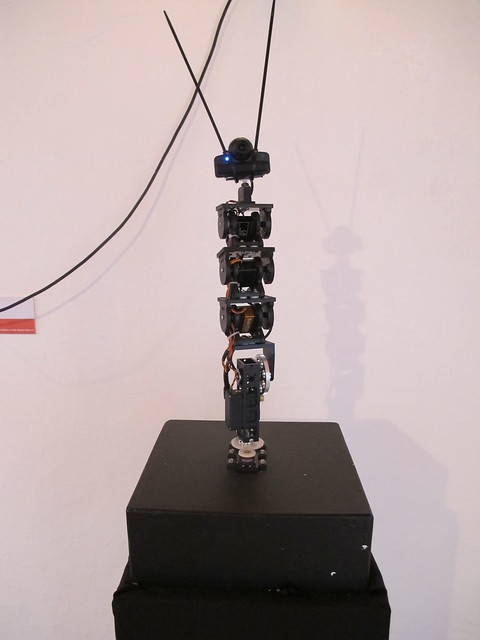
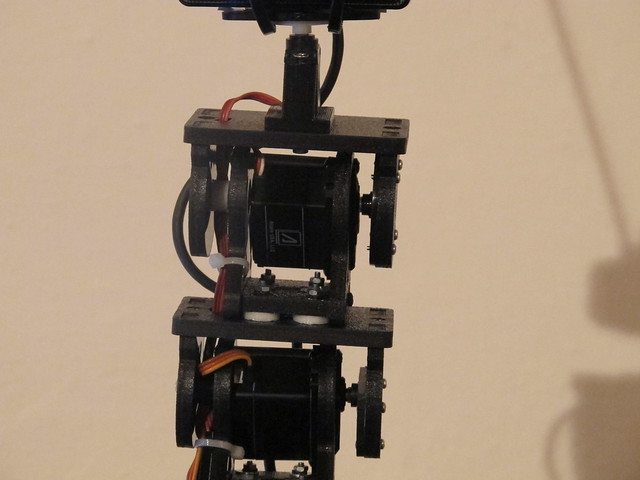
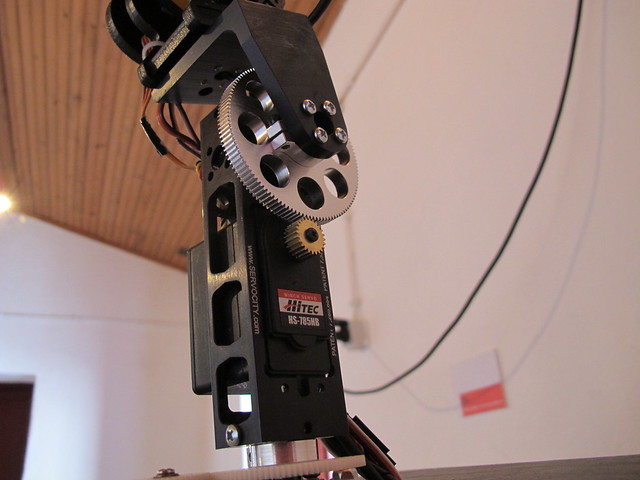
ICU2 is the evolution of the 1st iteration, this new version was totally upgraded, all the pans and tilts systems are from ServoCity, and the software had been re-written from scratch, the face tracker component is on a openFrameworks program wich makes it more performative, and on the Processing side we had a preset based animation program, everytime it looses a face it will load a preset with a diferent animation, this makes it more organic and less repetitive, I will talk more about the software on another post.
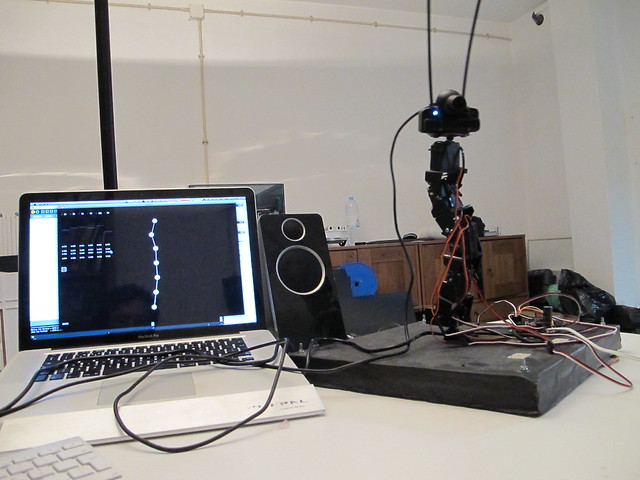
This installation is ment to work without the screen, it focuses the attention of the viewer on the ICU, but both of the exhibitions had the screen there as you can see. The knowledge pavilion required the screen to be there because it shows all the control side of the mechanism, and they want to show it to the visitors, and on the FCT Open Day, this exhibition was ment to be visited by new engineering students so we decided to let the screen to be there as well.