I know, I haven’t posted anything since… March!?
But these “no posting days” are ending I assure you!!!

I know, I haven’t posted anything since… March!?
But these “no posting days” are ending I assure you!!!
Teatro ABC.PI invited Artica to give a one day “Introduction to Robotics” workshop at “Ponto de Encontro” in Cacilhas (Almada), and the good news is that it is totally free, the not so good news is that you need to hurry up because there is a limitation to 15 participants. This is an initiative of “Quinzena da Juventude” and “Camara de Almada”.

2011 was a great year for Artica, check for yourself, we will appreciate that you share this video and help us to make 2012 an even better year!!
Cheers!
Einstein VideoPlayer is a project that I initiated during a dance performance entitled “Einstein Dreams” created by Rui Horta. All this took place at Göteborg Opera in Sweden, September of 2010.
Einstein is not just a tool to play videos, it allows anyone to play a list of videos, cross fading between them, with the possibility to adjust the video output to many kinds of surfaces.
“Content is king”, I believe that this tool can be an ice breaker to anyone that intends to playback videos in thousands of different manners.
This is the first public release, however this will always be a work in progress project, and being open source we intend that you use, modify, hack and share this tool.
– – – – – – –
– – – – – – –
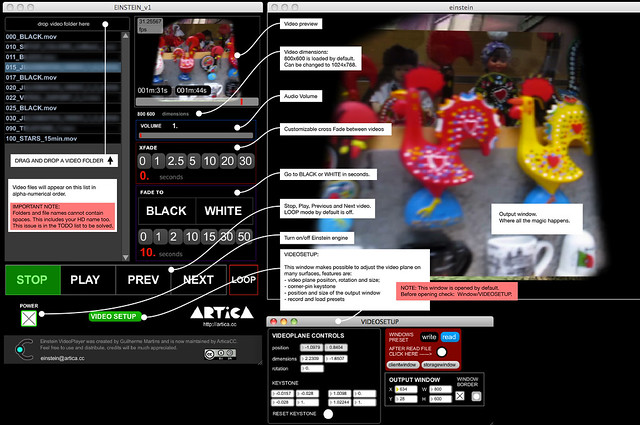
CLICK THE IMAGE TO SEE IN FULL RESOLUTION
List of features available ATM:
– playlist with file names;
– parametric crossfade between videos;
– parametric fade in and out to black and/or white;
– keystone / corner-pin adjustment;
– record and load custom presets.
Future versions will include:
– mask overlay with a PNG with transparency;
– independent multiplayer system (optional);
– one player as Master and the other player as Slave (optional);
– customization for several outputs;
– edge-blend;
– subtitle overlay;
– Improve modularity for fast prototyping and custom projects;
– Improve performance;
– Create the same GUI paradigm to control audio and light;
– Cue list to control everything;
– MIDI, DMX and OSC protocol to control Einstein, and to be controlled by Einstein.
Magabot is an open hardware and software robotics platform designed to stimulate creative minds.

Any robot with a computer is a very powerfull robot, and because all laptops have a camera, a screen, speakers, microphone, batteries and usb interfaces, your robotics experience will be empowered with Magabot.
This project is being developed in a partnership with IDMind, Artica and with the participation of Francisco Dias.
The Software:
Many applications are being developed right now, follow colors, wall follower, face detection, among many others.
We will provide interfaces for VisualStudio, .NET, c#, c++, openFrameWorks, Processing, Arduino, Flash, Unity3D, MAXMSP, PD and if you feel like you want to develop your own interface you will be welcome too, we give full credits on everything.
You will be able to download apps for the Magabot, to develop your own apps, and if you feel they deserve money, you will be able to sell them too.
The hardware:
The hardware is made with rigid PVC and a differential drive chassis with highly precise encoders on both motors at the commands of an Arduino and a customized shield. You’re completely invited to change and adapt it to your needs.
The basic setup integrates:
– PVC chassis with DC motors with encoders;
– Three Infrared-sensors on the bottom to detect stairs or lines;
– Two bumpers on the front to detect collisions;
– Three RGB leds if you are in the mood for some tuning;
– A battery sensor to know how if it is in the need for some juice;
– I2C bus on top to connect any I2C devices;
– A 7.2v battery and a charger.
Add-ons built at the moment:
– Pack of 5 Maxbotix sonar sensors with PVC supports to connect to the upper I2C BUS;
– Other add-ons are beeing developet at the moment.
– – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – –
We lauched the magabot.cc site today, this website will be a repository for informatiom, source code, apps, hacks, support forum, and a place to buy Magabots.
– – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – –
Magabot is a protoproduct, we are commercializing our open source and open hardware best prototype at a low cost:




If you buy one you will automatically enter on our beta test program, we invite you to share your experiences and to post your results, we will also provide you with support for you to be able to use it, change it, and play with it.
The current price for the platform wthout the sonar kit is 250€ plus VAT.
The current price for the sonars kit is 100€ plus VAT.
If you need more information please contact us: info [at] magabot [dot] cc

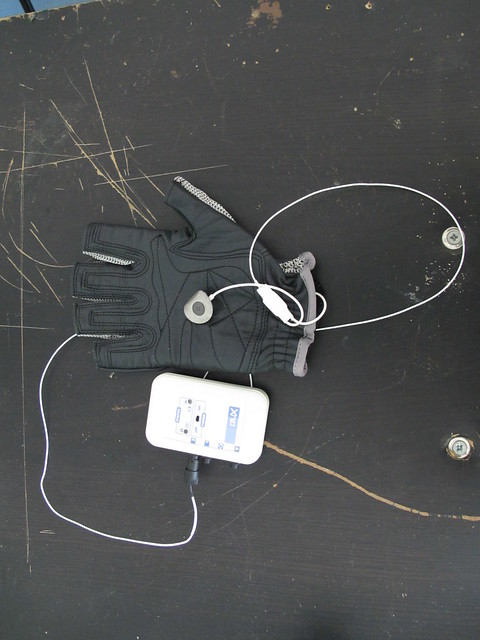
This TEDxEdges was a huge event, and Artica marked its presence on stage with the Einstein VideoPlayer adapted to play the videos between the talks, and with a video mapping system to display the data captured by biometric PLUX sensors.

There were 4 gloves on the room, and each person wearing a glove would be able to send its emotions to the assigned ‘TEDx’ letter.

I went to stage with André to briefly present Artica’s presence on the event, they mentioned the Farruscos playing sumo, the Magabot in telepresence mode being driven by Francisco Dias and finally what was behind the ‘TEDx’ letters.
In the foyer there were an arsenal of 5 Magabots all available to be remotelly controlled in Telepresence. This system is made with Skype and simple interface running on the robot side. So all you need is a Skype account and nothing more.
Gareth, Voodoobot, Birdmun and Ro-Bot-X from LetsMakeRobots were very present on the site, some of them even went outdoors and had a couple of adventures!! :)

This video shows an Avatar to Avatar encounter!!! Its me and Gareth giving a kiss.. lol
This is another view of the Foyer:
Then there were a troop of 10 Farruscos, Francisco Dias coded two of them to play sumo, and they are really fun to watch!!
Farruscos did made the day of kids! They were completly stunned with the little bots!

Artica’s team having lunch, the bests!! :) Fernando Gomes, André Almeida, Francisco Dias, Gonçalo Lopes and Guilherme Martins.

Artica’s founders, Guilherme Martins and André Almeida:

Last Wednesday Artica lectured a Motoruino workshop at AltLab.
Beside all the participants there were more than a hundred watching a live stream on Ustream, people from Viseu, Guimarães, Porto, Évora, Madrid and many more places I believe.
The central theme was Motoruino and motors such as Servos, DC motors, Steppers and Linear actuators.
In the end we had Farrusco working in Obstacle Avoidance and Following Light mode.
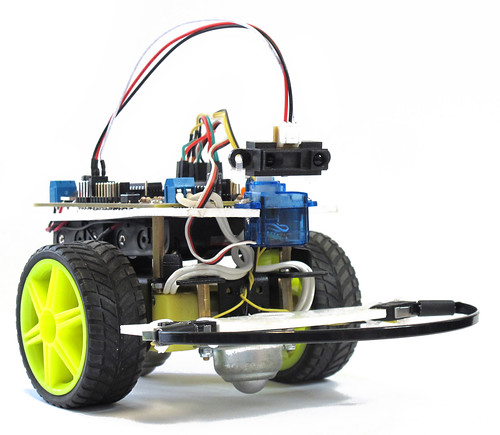
Farrusco is a small robot based on the Arduino platform, in this case, is using a Motoruino wich is inspired on the Arduino but with a couple of enhancements – dc motor dual controller, servo and sensor plugs.
With Farrusco you will be able to make it avoid obstacles, follow walls, enter in free space mode, and in the future more add-ons will be available, just to name a few: line follower, speakers and light sensors, RGB leds, and so on.
This robot is intended to:
– enthusiasts wishing to enter in the creative computing and robotics fields but don’t know where to start;
– engineering and physical computing students who need a development platform;
– digital artists and designers;
– students of all grades;
– be a simple toy.
More information @ guibot.pt/farrusco
At Artica, we had a request to link MAXMSP to an industrial motor for an artistic installation witch we will speak about at another time.
This motor is a true beast, and since we have never worked with such a thing we decided to ask for help to our electronics guru David Palma.
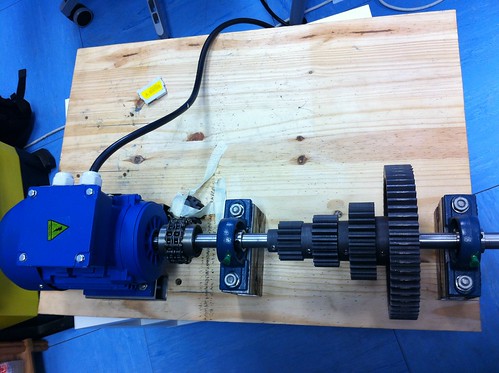

The motor controller:
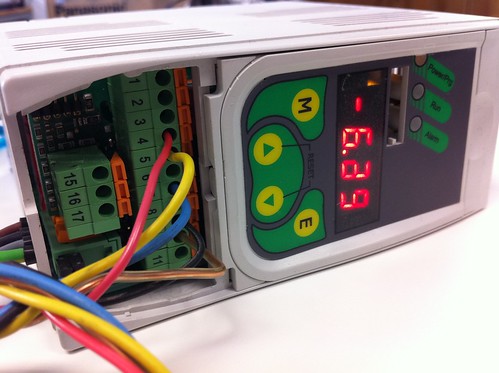
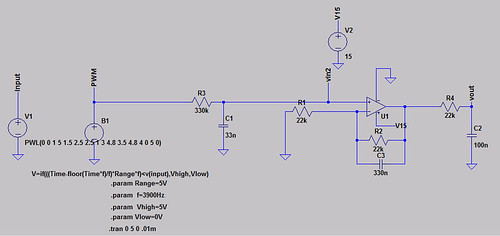
David developed an electronic circuit to simulate a PWM analog output from 0 to 10v (originally it gives 0 to 5v), and another circuit to switch motors direction, both circuits were assembled on a shield and connected to the motor controller.
The first circuit is a transducer:
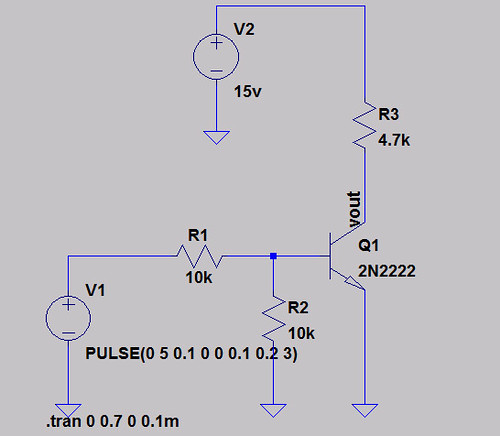
And this is the switch circuit that tell to the motor controller wich direction the motor will spin:
Then he builded an Arduino shield:
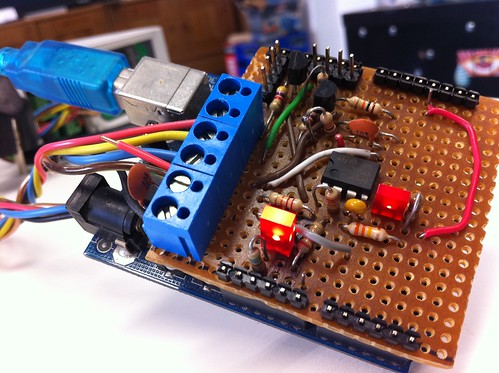
And the final part was the Max patch that send the direction states and the PWM values to the Arduino:
And this is the result:
MAXMSP – ARDUINO – INDUSTRIAL MOTOR from artica on Vimeo.
And last but not the least all the source codes can be downloaded here
Like everything, there is always an idea at the very beginning and this time was no exception.
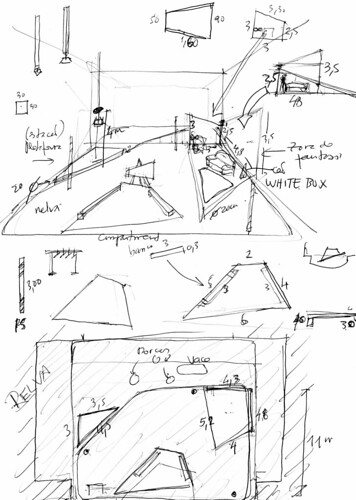
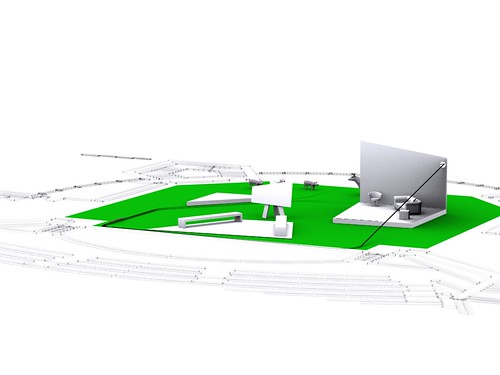
Rui Horta gave me a drawing with a set design to be created in 3D. Creating environments in 3D is always good for a first impression of the set, to detect possible flaws and to comunicate ideas with set designers, performers, musichians, technicians and with everyone involved.
This was the first iteration of the set:
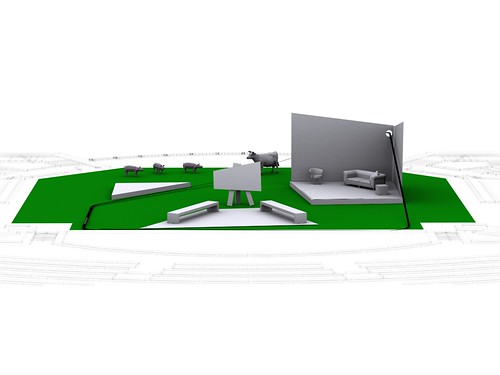

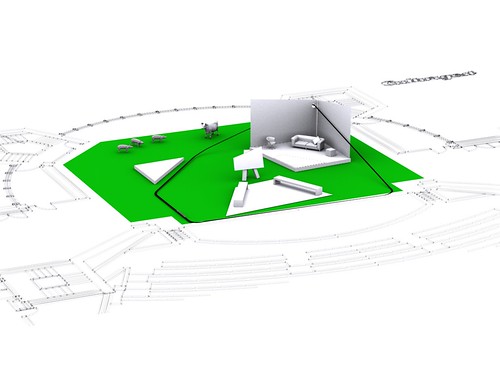
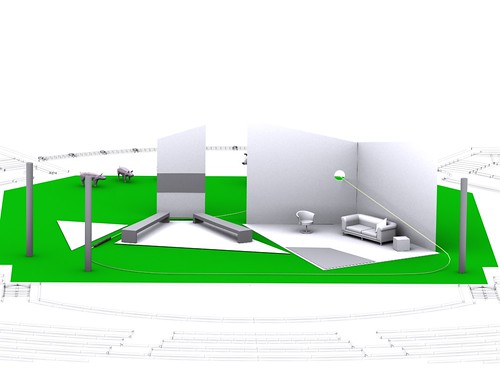
After many discussions and iterations, the design became aesthetically more solid:

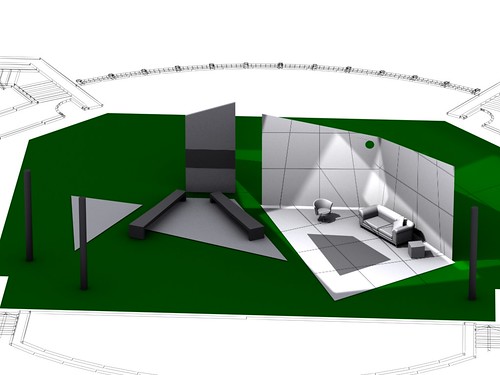
After solving all the issues with the set, was time to design the most efficient projection system. At first I made a couple of tests in the 3D environment:
Testing one projector for the fantasy zone, and another for the train cabinet:

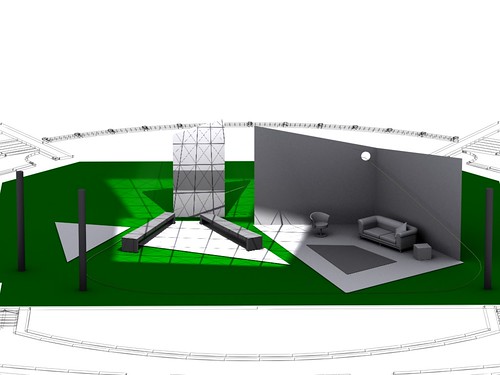
Testing one projector for each single wall/floor, this turned out to be the most efficient way to do it:
The next step was to test the fantasy area (the right side of the stage) in a smaller scale, but this time in a real environment. I used PVC sheets and wood for this.
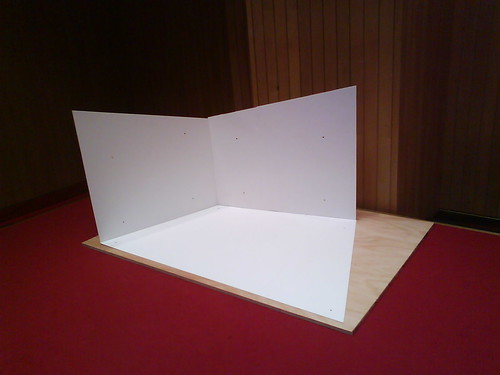
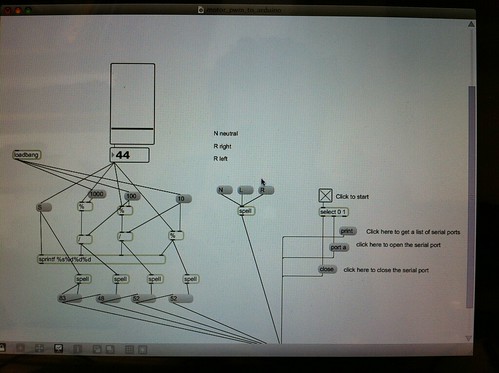
Each projector is pointing directly to each wall and floor. And because my digital camera is broken I only have photos taken from my crappy mobile. The photo below shows a bit of the Jitter software, at this point final adjustments on the code were being made:

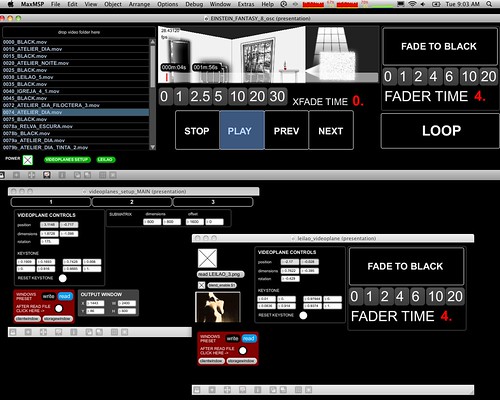
This is a closeup of the program, it consists on a video player with the possibility of crossfading between each video with custom xfade time, slipt one entire video into 3 different videoplanes, where each videoplane can be adjusted accordingly the projection needs, perspective, width, height. Click on the photo if you want to see more screens.
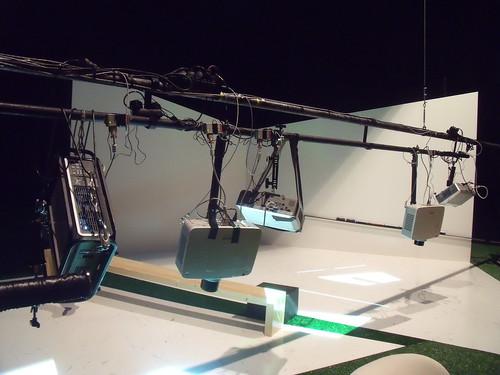
We went to the stage with a full planning of the projection system, 6 projectors to be rigged on a single bar. One Big Thanks to the Culturgest amazing crew, this complex task was accomplished smoothly!!
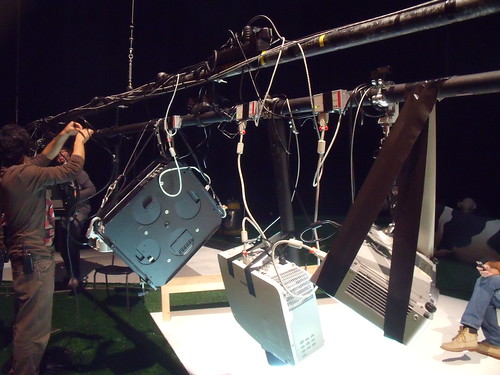

Some stills of my visual work:






More photos here:
http://lab.guilhermemartins.net/2010/12/18/paint-me-insights/