Like everything, there is always an idea at the very beginning and this time was no exception.
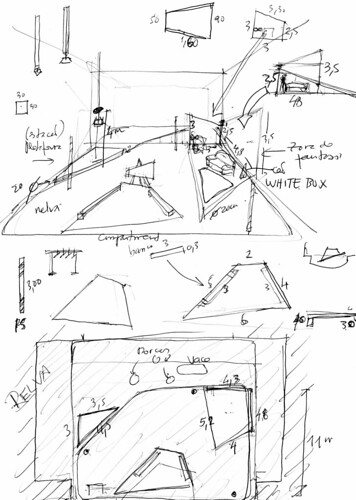
Rui Horta gave me a drawing with a set design to be created in 3D. Creating environments in 3D is always good for a first impression of the set, to detect possible flaws and to comunicate ideas with set designers, performers, musichians, technicians and with everyone involved.
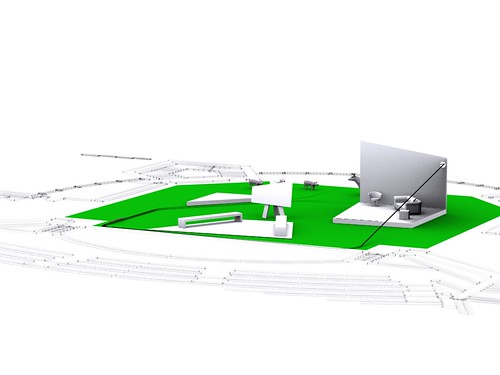
This was the first iteration of the set:
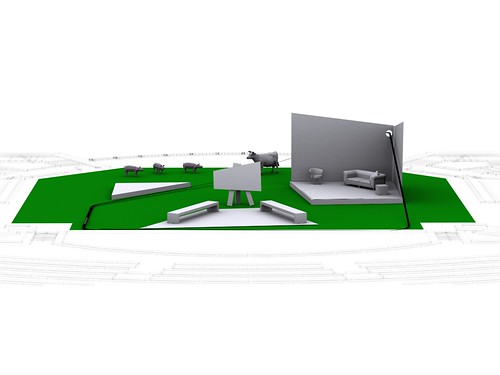

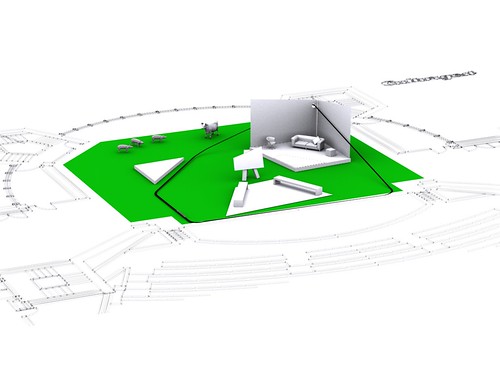
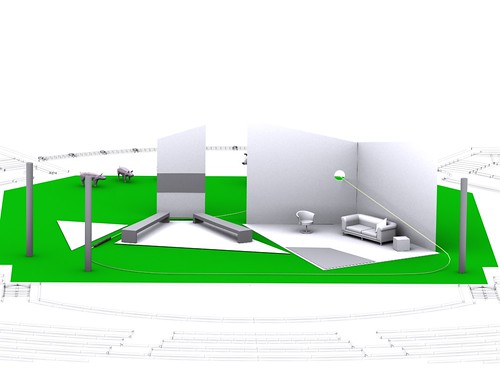
After many discussions and iterations, the design became aesthetically more solid:

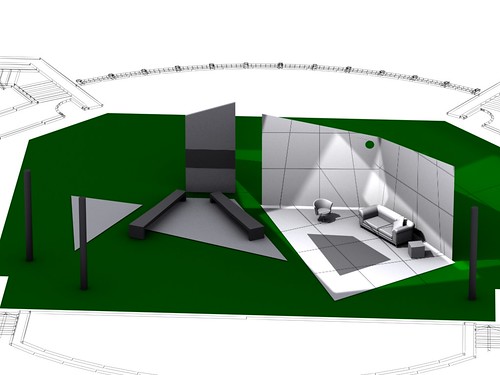
After solving all the issues with the set, was time to design the most efficient projection system. At first I made a couple of tests in the 3D environment:
Testing one projector for the fantasy zone, and another for the train cabinet:

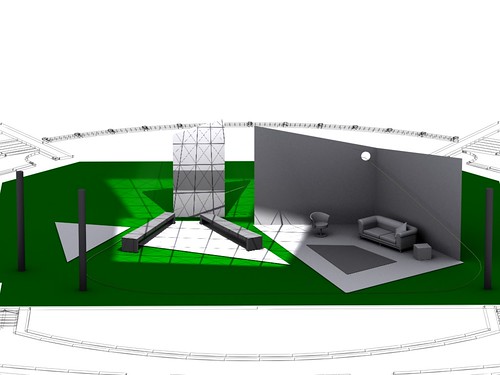
Testing one projector for each single wall/floor, this turned out to be the most efficient way to do it:
The next step was to test the fantasy area (the right side of the stage) in a smaller scale, but this time in a real environment. I used PVC sheets and wood for this.
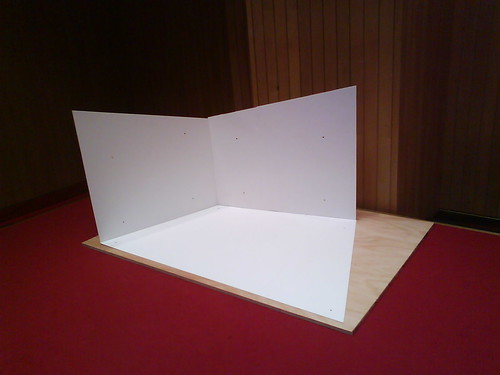
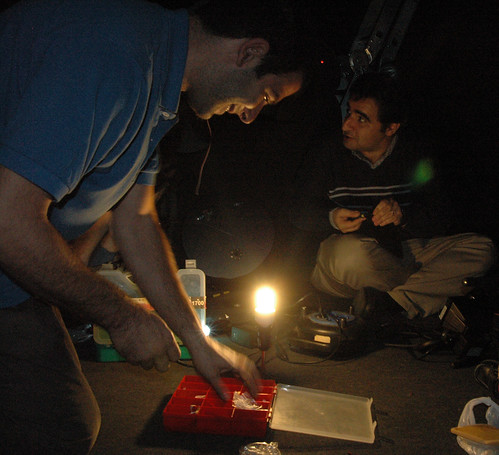
Each projector is pointing directly to each wall and floor. And because my digital camera is broken I only have photos taken from my crappy mobile. The photo below shows a bit of the Jitter software, at this point final adjustments on the code were being made:

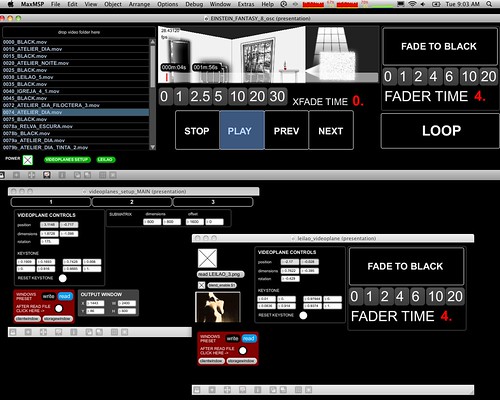
This is a closeup of the program, it consists on a video player with the possibility of crossfading between each video with custom xfade time, slipt one entire video into 3 different videoplanes, where each videoplane can be adjusted accordingly the projection needs, perspective, width, height. Click on the photo if you want to see more screens.
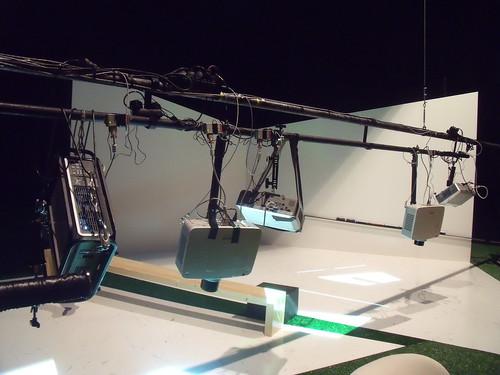
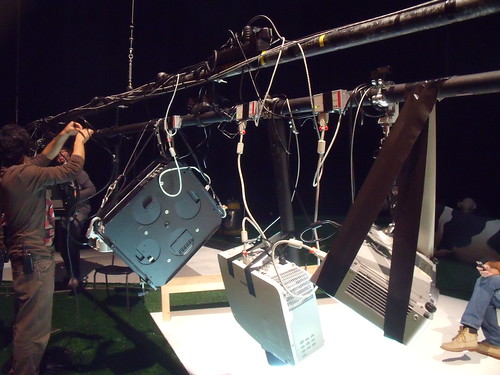
We went to the stage with a full planning of the projection system, 6 projectors to be rigged on a single bar. One Big Thanks to the Culturgest amazing crew, this complex task was accomplished smoothly!!

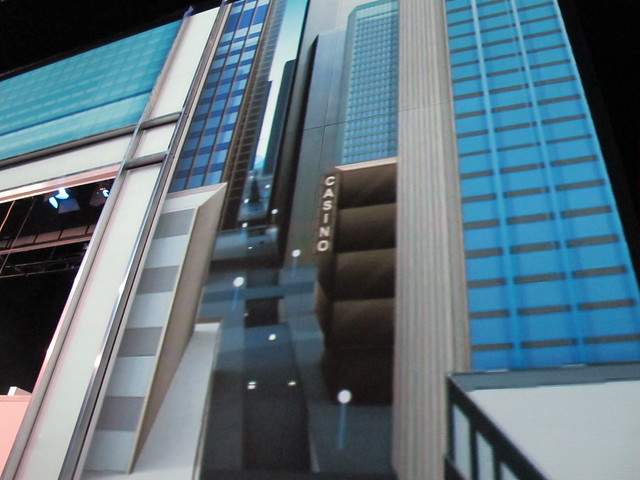
Some stills of my visual work:






More photos here:
http://lab.guilhermemartins.net/2010/12/18/paint-me-insights/