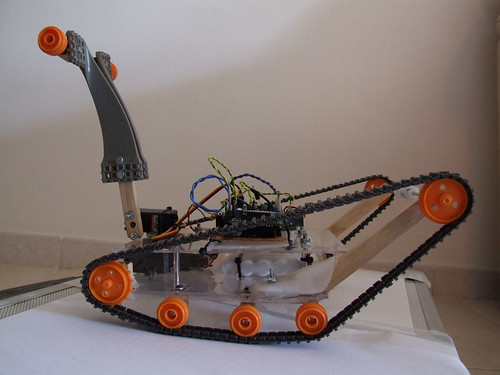
Since I’ve started messing with robotics that I wanted to build a tank, and finally that moment arrived when two Tamiya thread kits and a Twin Motor Gearbox arrived.
Since I’ve started messing with robotics that I wanted to build a tank, and finally that moment arrived when two Tamiya thread kits and a Twin Motor Gearbox arrived.
After completing the new motor driver board, now I feel ready to continue with the development of this bot..


For now it´s just remote controlled, but it will have some intelligence soon.
I will try to add microphones and use them as sound sensors. If I add for example 4 microphones, one on each side of the bot I could detect where does the sound come from and make it move in that direction, then add a couple of distance sensors to avoid obstacles..
My living room seems to be too small to drive this bot..
see it on MAKE :]

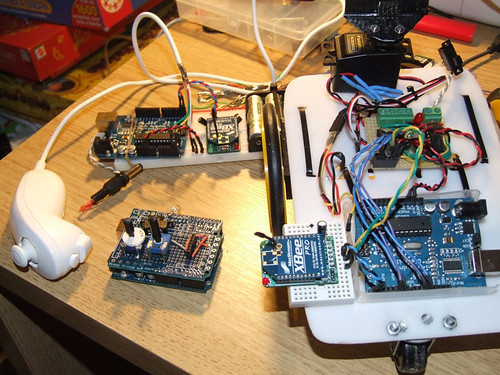
I wanted to keep working with the XBee modules, and I thought it would be cool to control Farrusco.
So, first I used 2 potenciometers and assigned one to each motor.. and then I used a nunchuck controller.
Both require a learning curve and it’s only after a while that you start to feel the touch :]
This is the code I´m using to control the robot with the Nunchuck
— please check an updated code sample on the following post —
http://lab.guilhermemartins.net/2013/08/01/new-basic-arduino-serial-communication/
I´ve created this example to make two Arduinos talk in a simple and clear fashion.
You will see below an example with wires, and another one without wires.
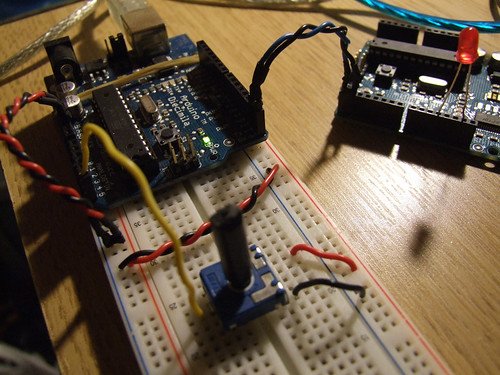

Continue reading Serial Comunication between Arduinos – With Wire & Wireless