
I was asked to document how I did the talkie walkie bot, and you can take a look at the tutorial in the original post:
http://lab.guilhermemartins.net/talkie-walkie/
I was asked to document how I did the talkie walkie bot, and you can take a look at the tutorial in the original post:
http://lab.guilhermemartins.net/talkie-walkie/
Este fim de semana tive o prazer de dar a primeira edição de Workshops de Robótica Criativa no Porto no espaço Imerge e com o apoio fantástico da Inmotion.pt.
This is the new version of Farrusco, tomorrow we will build a bunch of them at the workshop, and you will be able to build your own very soon.. We are planning more future workshops! ;)
Say hello Farrusco!! :)

After long research and trial and error, I´ve came up to a new walkthrough regarding this nice chip, the L293D.
Each project is one project and each one has its own unique power configurations, so you must be aware of the best battery choice and how to distribute voltage through your robot.
I strongly advice you to read the following articles:
Picking Batteries for your Robot
Once you’ve decided on batteries, how do you regulate the voltage
************************************************
L293D gives you the possibility to control two motors in both directions – datasheet
************************************************
The L293D Circuit:
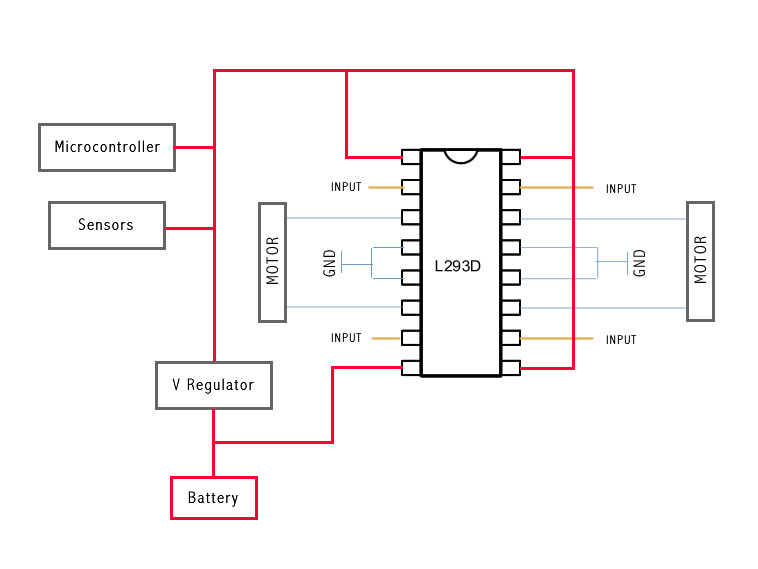
Basic Implementation:
This is the most basic implementation of the chip.
As you can see, a 5V Voltage Regulator is between the battery and pins 1, 9, 16.
Pin 8 gets power before the VReg, if your motor needs for example 6V you should put 6V directly in this pin, all the other pins should not get more than 5V.
This will work with no problem at all, but if you want to do the right implementation take a look at the next example:

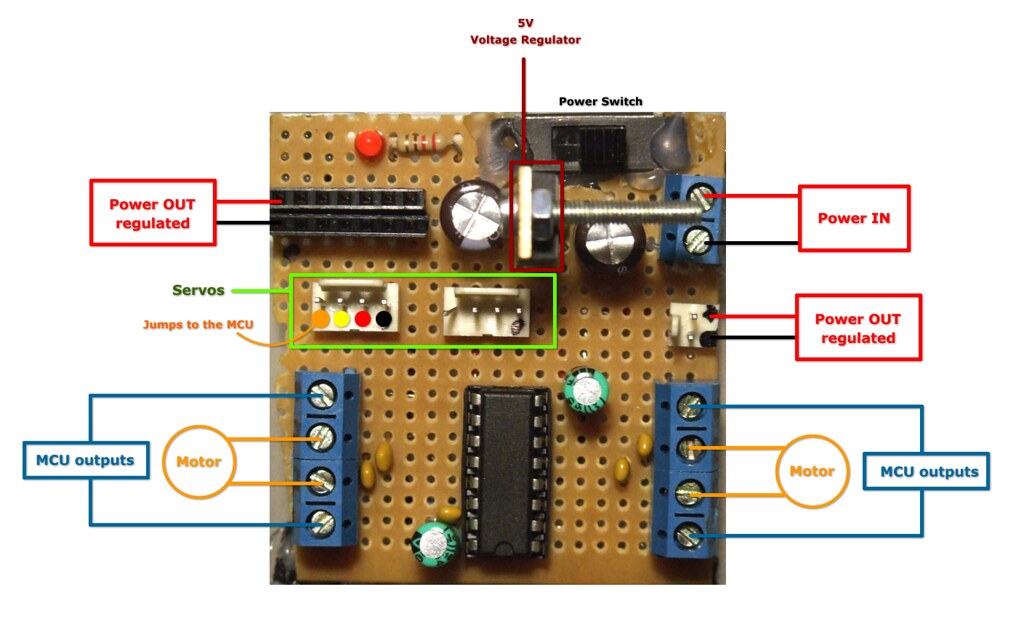
This is the correct Implementation (with the capacitors), and note that pin 8 is feeded by unregulated voltage. This means that if your motors need more than 5V, you should power this pin with that amount of voltage, and the rest of the circuit with 5V.
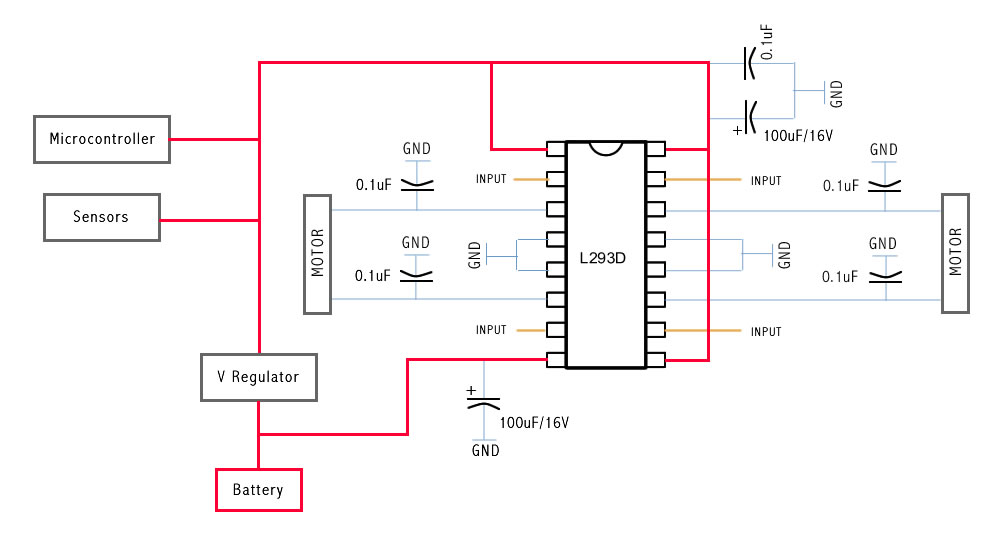
The capacitors stabilize the current.
The same circuit on a breadboard:

Soldered on a pcb and ready to go:
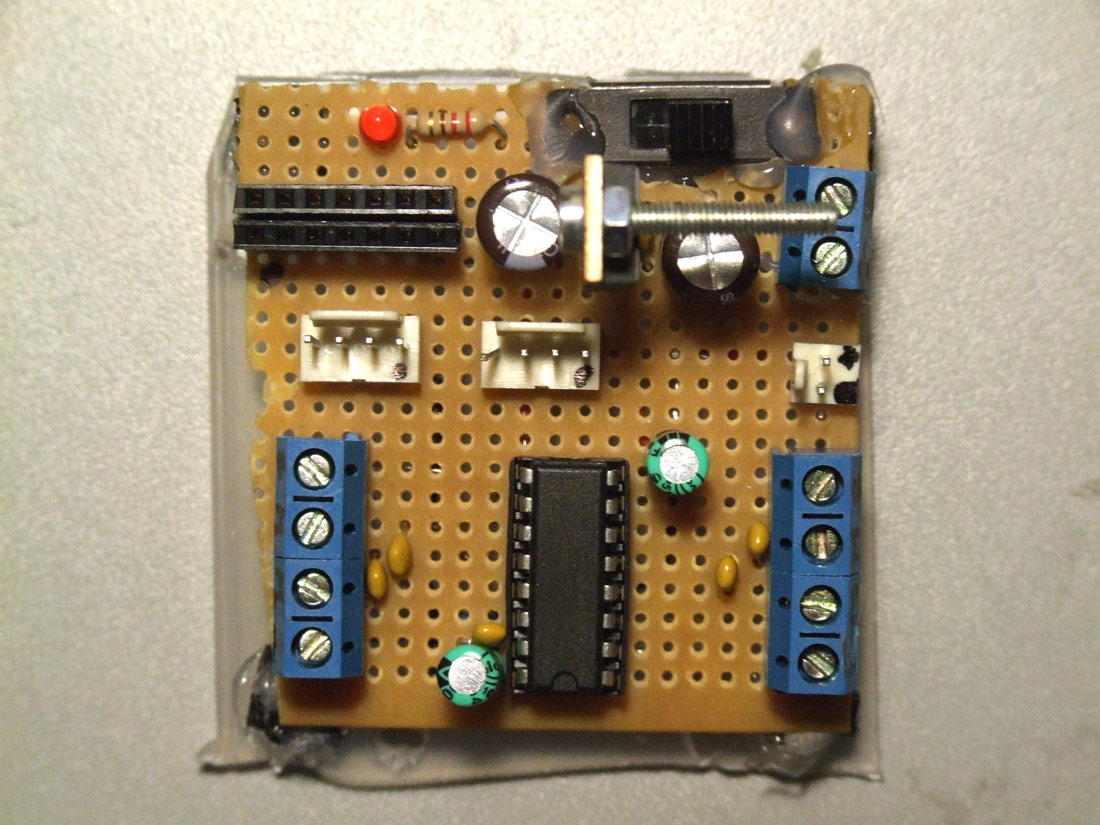
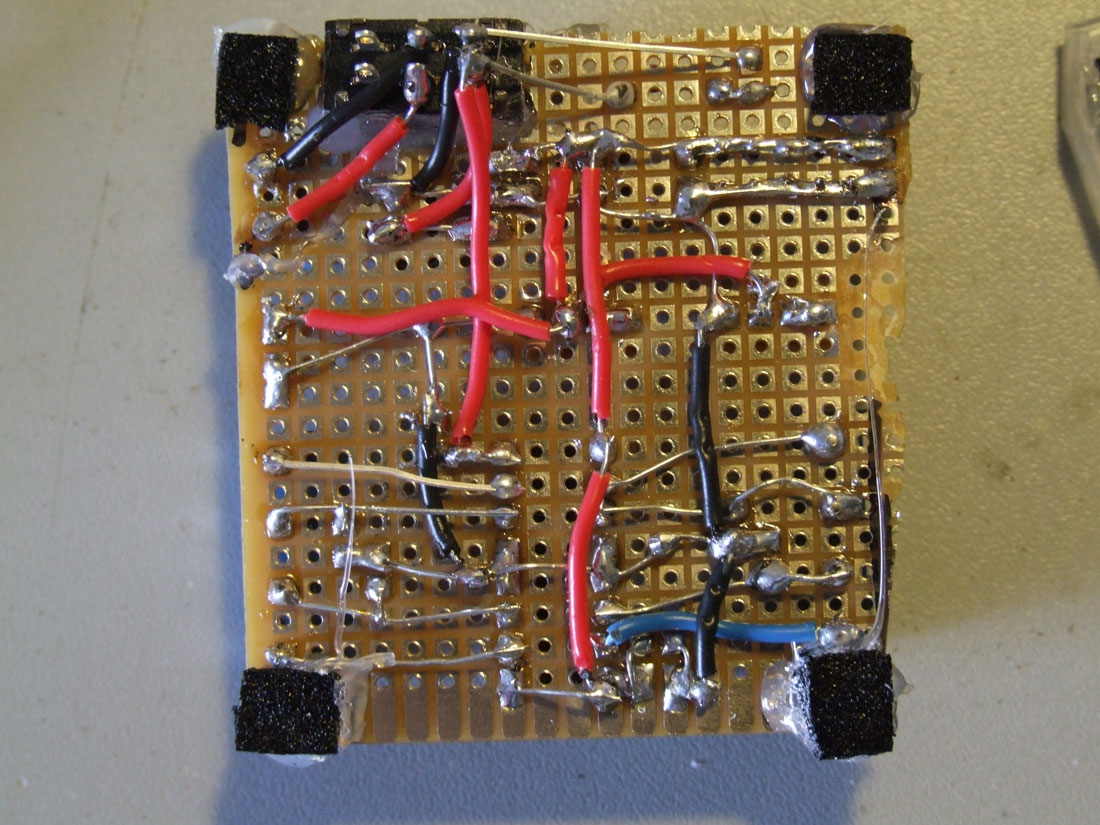
This is the back of the circuit, click for high resolution photo.
// Use this code to test your motor with the Arduino board: // if you need PWM, just use the PWM outputs on the Arduino // and instead of digitalWrite, you should use the analogWrite command // ————————————————————————— Motors int motor_left[] = {2, 3}; int motor_right[] = {7, 8}; // ————————————————————————— Setup void setup() { Serial.begin(9600); // Setup motors int i; for(i = 0; i < 2; i++){ pinMode(motor_left[i], OUTPUT); pinMode(motor_right[i], OUTPUT); } } // ————————————————————————— Loop void loop() { drive_forward(); delay(1000); motor_stop(); Serial.println(”1"); drive_backward(); delay(1000); motor_stop(); Serial.println(”2"); turn_left(); delay(1000); motor_stop(); Serial.println(”3"); turn_right(); delay(1000); motor_stop(); Serial.println(”4"); motor_stop(); delay(1000); motor_stop(); Serial.println(”5?); } // ————————————————————————— Drive void motor_stop(){ digitalWrite(motor_left[0], LOW); digitalWrite(motor_left[1], LOW); digitalWrite(motor_right[0], LOW); digitalWrite(motor_right[1], LOW); delay(25); } void drive_forward(){ digitalWrite(motor_left[0], HIGH); digitalWrite(motor_left[1], LOW); digitalWrite(motor_right[0], HIGH); digitalWrite(motor_right[1], LOW); } void drive_backward(){ digitalWrite(motor_left[0], LOW); digitalWrite(motor_left[1], HIGH); digitalWrite(motor_right[0], LOW); digitalWrite(motor_right[1], HIGH); } void turn_left(){ digitalWrite(motor_left[0], LOW); digitalWrite(motor_left[1], HIGH); digitalWrite(motor_right[0], HIGH); digitalWrite(motor_right[1], LOW); } void turn_right(){ digitalWrite(motor_left[0], HIGH); digitalWrite(motor_left[1], LOW); digitalWrite(motor_right[0], LOW); digitalWrite(motor_right[1], HIGH); }
***********************************************************************************************
update 26/4/09
***********************************************************************************************
My 1st instructable :)
Control your motors with L293D and Arduino – More DIY How To Projects
Esta tradução foi feita com o consentimento do seu autor.
O artigo original encontra-se aqui.
Todas e quaisquer questões relativamente ao seu conteúdo deverão ser discutidas no forum LMR (se possivel em inglês) .
Todas e quaisquer questões relativas à tradução para português por favor comuniquem ao tradutor (eu) .
——————————————————————————-

Este projecto não requere conhecimento de electrónica, e não está no âmbito deste projecto aprofundar muito neste sentido, apenas vai fazer com que dês o primeiro passo na construção de um robot muito rapidamente. É baseado num sistema chamado Picaxe que apesar de ser muito simples é também bastante poderoso. Se quizeres experimentar outra plataforma igualmente simples e robusta existe o Arduino.
Tens aqui um projecto simples que usa um Arduino e uma breadboard para construir um simples perseguidor de luz.
— please check an updated code sample on the following post —
http://lab.guilhermemartins.net/2013/08/01/new-basic-arduino-serial-communication/
I´ve created this example to make two Arduinos talk in a simple and clear fashion.
You will see below an example with wires, and another one without wires.
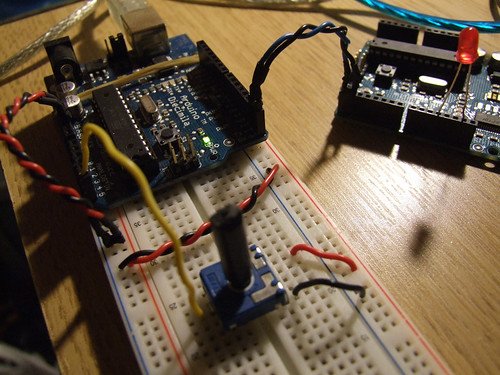

Continue reading Serial Comunication between Arduinos – With Wire & Wireless
Actualização:
Aqui vai a tradução à muito esperada deste tutorial, espero que vos seja útil.
Decidi remover a Ponte-H, o motor agora está directamente ligado às pilhas AA e o Arduino é alimentado por uma pilha de 9V. Este pequeno robot apenas anda em frente (para já).
Na 2ª parte vou adiccionar a Ponte-H e dois botões Bump. Assim o nosso pequeno robot poderá evitar obstáculos mudando de direcção.
UPDATE: I decided to remove the H-Bridge part, now the motors are directly connected to the AA batteries, and the Arduino is connected to the 9V battery. This little bot will move only forward.
In Part II, I will add an H-Bridge and two SPDT Bump Switches. The robot will move in both directions and avoid obstacles.
————————————————————