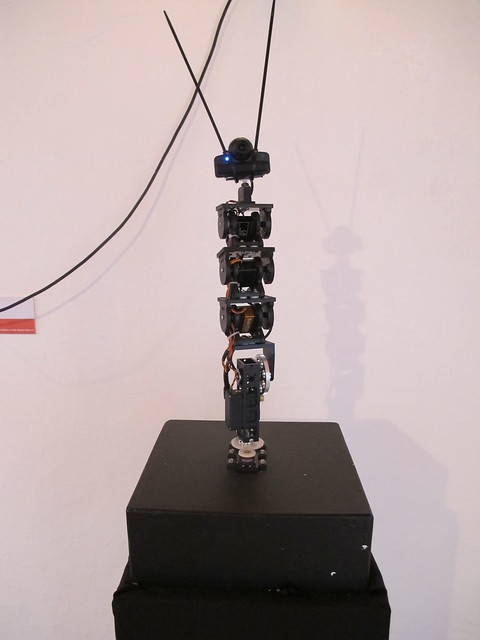
I SEE YOU TOO, is the 2nd version of the original ICU
This version gained an upgrade in both hardware and software.
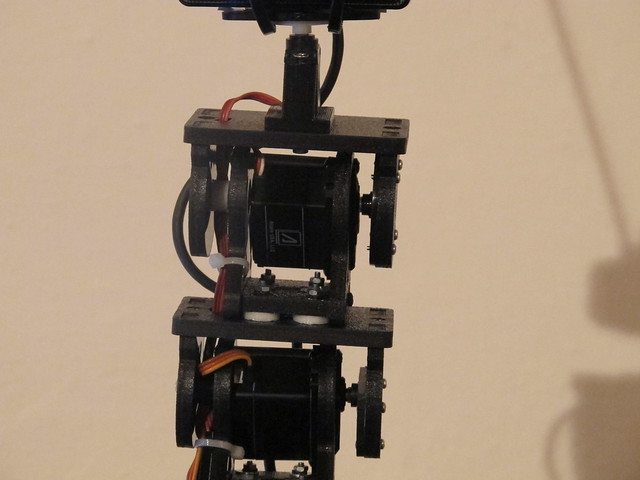
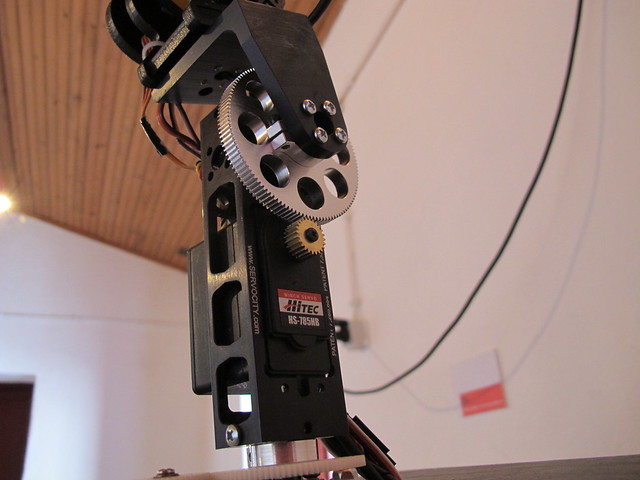
The hardware is mostly based on servocity.com pan and tilt systems.
This is a work in progress, until now what is implemented is Face Detect with the openCV library for Processing.
Next stage is to implement a more robust face and emotions detection and this will run on top of an inverse kinematics algorithm. What we want the most is ICU2 to be a living organism, with a complex behavior tree system.
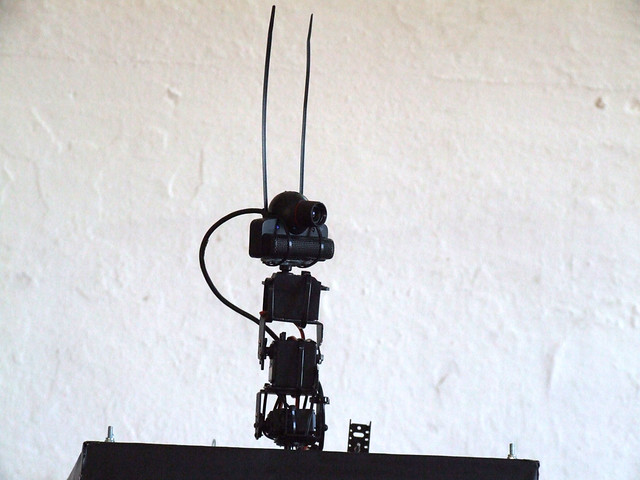
This time I not just wanted to see what a robot sees, but I also wanted to give the robot the ability to understand that there is a person in the room, and stare at the person.
To detect faces I used the OPENCV library for Processing, wich turns out to be very fun to work with and is very sensitive to human faces.. and sometimes it detect faces where there aren’t any.. maybe it is a ghost face detector algorythm!!
I didn’t have time to work with the four motors, I am only working with the two servo motors on the top. Next step will be to apply inverse kinematics and have a better level of interactivity.
Unfortunately I had to pick the computer that was being used in this installation, I will need it in the next weeks, but this bot will be available to the public very soon I promise!!