
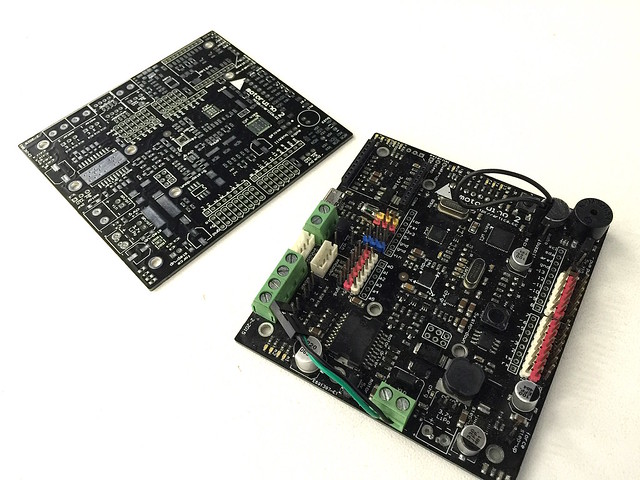
Motoruino2 is a great board, has a built-in IMU, motor encoder connections and an L298 for more power demanding motors, there is a dedicated low-level Arduino (uno) to handle all the raw data from this sensores and actuators. Then, there is a high-level Arduino (Leonardo) that is totally available to whatever we want to do. Both microcontrollers communicate via I2C. There is also a speaker and a microphone that I intend to use later on this project. Also an xbee socket, 1S lipo charger and a mosfet output capable of driving about 2 amps.
Enough said, its a great board and I hope Artica manage a way to put it into the market. Just see for yourself :)
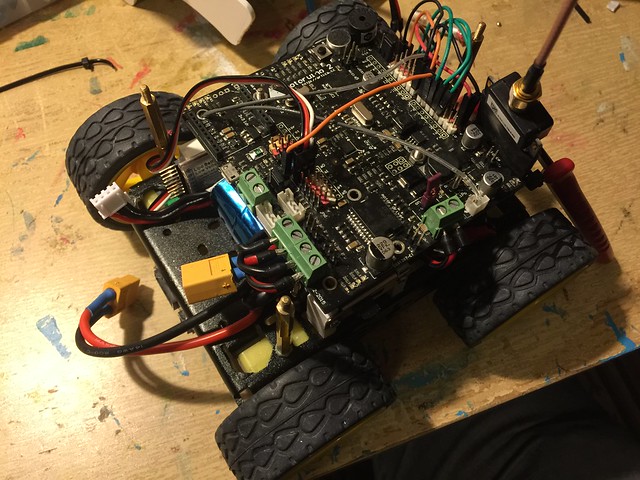
This is how the bot is looking..
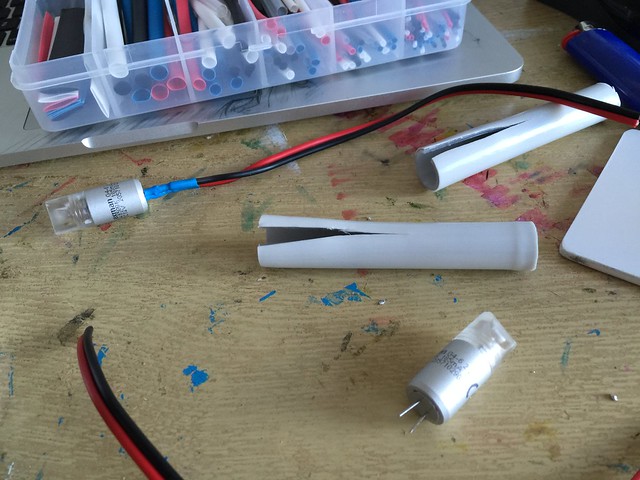
I want to have some lights and I found this little 12v LED lights on the hardware store, this little things in full power completely blind you! To drive the LEDs I am using the mosfet output on the board.
And the shell of course, I changed the pan and tilt system, this is a much robust solution and I removed the pan, if I want to pan I just move the bot side to side.

Et voilá… :D



