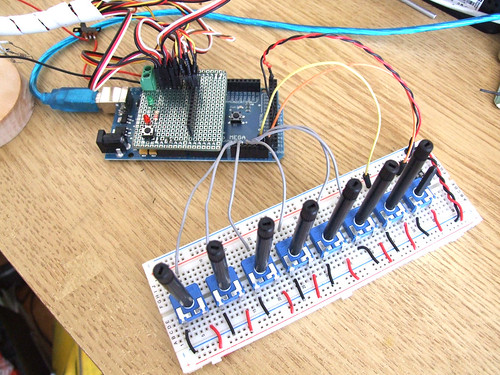
After proving myself that I could build a 4 step sequencer, I decided to move further and put it on a prototyping board, this time with 8 steps, and start messing with MIDI parameters like Velocity and Gate.

Because time is that precious thing, and this is being done after labour hours, I just soldered jumper wires to the components going directly into the Arduino headers, I really wanted to start programming this thing.

Such a crazy setup also means that hardware debugging will be a nightmare, I guess I have absolute faith in my soldering and wiring skills :D I totally disencourage anyone to approach a project this way, but anyway, do as I say not as I do..
The following video shows a quick test drive. The arduino sends MIDI messages to an Axoloti Core through MIDI, witch is the instrument being played.