27-August-2009 UPDATE:
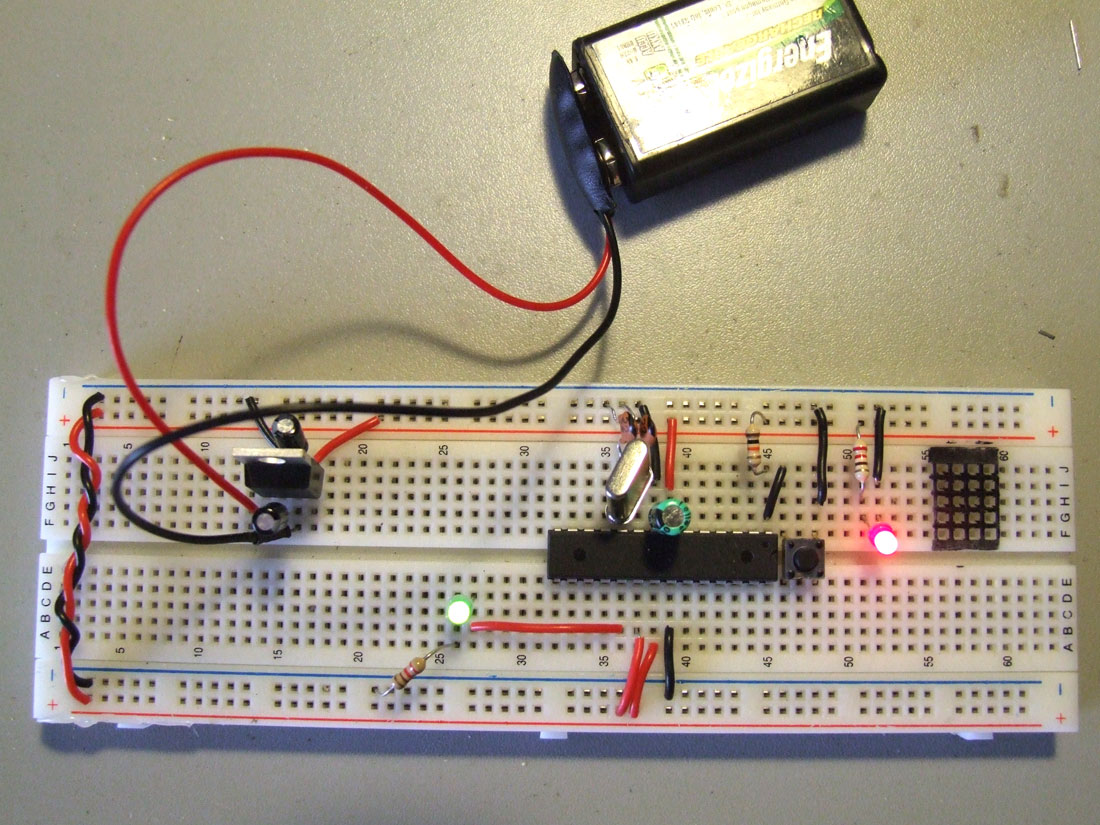
My friend Gerhard from Germany asked me to build a walkthrough regarding the G-Remote, with part list, schematics and code. And here it is. Enjoy :D
___________________________________________________________________________
This is my first attempt to make a custom remote controller, and also my first customized Arduino.
After seeing this post made by OddBot I wanted to try to make one myself.
I figured out that if I purchased one remote controller it would be cheaper than buying two of these and paying shipment to Portugal.
So, ripping the guts from a game remote controller I get two joysticks, a couple of buttons, two nice motors and one small lcd.
Each joystick have one button inside, that is cool :-)
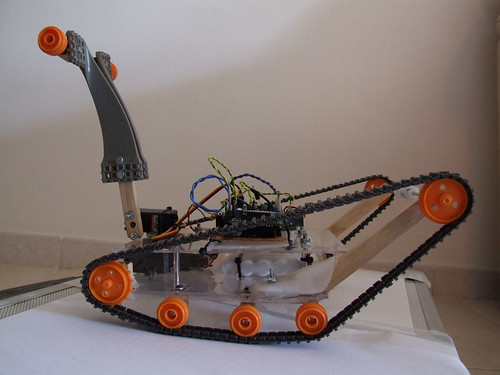
Now I have more control over my bots, specially the ones with two motors.. will post videos later.



no comments on this one :-)