
This website was created with a keyword since the very beginning – simplicity.
So, after long hours of discussion we finally came into this solution where all the contents are XML based.
(click on the image to enter the site)
Month: December 2008
ratb0t
This is the ratb0t, he has a nervous behavior and remainds me of a rat.. :]
I´m using an Arduino Diecimila to control the steering servo and the traction motor.
The XBee module receives data from another Arduino, this one has a wii nunchuck controller attached.
Next Step: make it autonomous
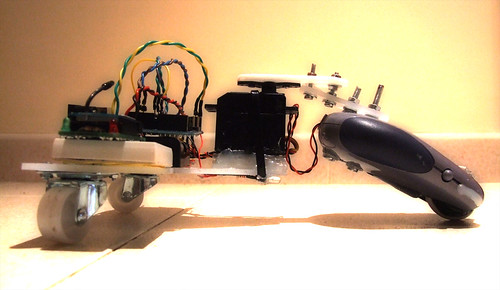
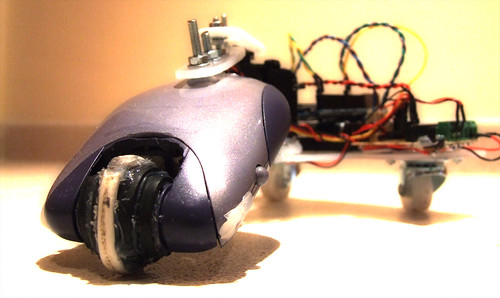
| Update: I forgot to tell a little story about this little and nervous fellow. One day my mother told me she had one hair-removal thing broken (Braun Silk Epil brand ), and she said that she would bring it to me so that I fixed it. Of course I accepted, but I must confess, I never ever tried to fix it :) This made me think a lot on how could I twist it and use it to give life to a robot. The most difficult part was to transform the front blades onto a wheel, I did it using pieces of bike air-chamber, rubber and hot glue. Shame on me because I didn´t document the building proccess.. I will try not to repeat it :) If you have some interesting mechanical broken items I accept them :) |

– – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – – –
Farrusco RC
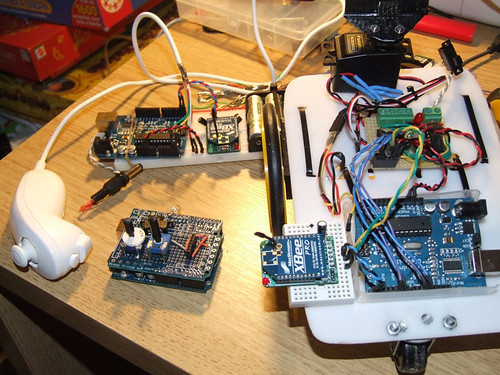
I wanted to keep working with the XBee modules, and I thought it would be cool to control Farrusco.
So, first I used 2 potenciometers and assigned one to each motor.. and then I used a nunchuck controller.
Both require a learning curve and it’s only after a while that you start to feel the touch :]
This is the code I´m using to control the robot with the Nunchuck
Serial Comunication between Arduinos – With Wire & Wireless
— please check an updated code sample on the following post —
http://lab.guilhermemartins.net/2013/08/01/new-basic-arduino-serial-communication/
I´ve created this example to make two Arduinos talk in a simple and clear fashion.
You will see below an example with wires, and another one without wires.
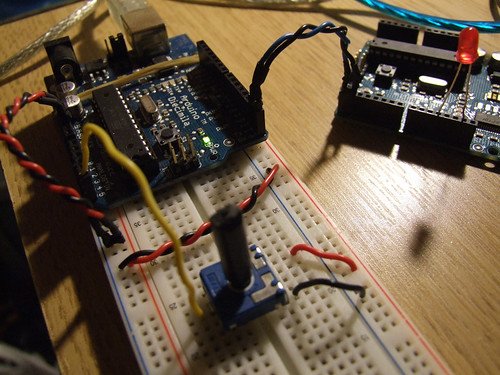

Continue reading Serial Comunication between Arduinos – With Wire & Wireless